|
El control de movimiento, o Motion Control, en inglés, es la rama de la automatización que se ocupa de los sistemas cuyas variables de control son variables cinemáticas y/o mecánicas. En los últimos veinte años se ha transformado en una tecnología estándar dentro en la industria y un mercado atractivo para los principales fabricantes de equipos de automatización. En cuanto a las características tecnológicas de sus componentes, se está dejando atrás la carrera por la velocidad de procesamiento y poder de cálculo en los controladores y drivers para entrar en una nueva etapa con desafíos en las áreas de software, redes de comunicación y posicionamiento absoluto.
Introducción
El control de movimiento, o Motion Control, en inglés, es la rama de la automatización que se ocupa de los sistemas cuyas variables de control son variables cinemáticas como ser posición, velocidad, aceleración, trayectoria y/o variables mecánicas como torque o fuerza. Estos sistemas entran dentro de lo que se denomina “Mecatrónica”, ya que se utilizan conceptos de la mecánica electrónica e informática.
Los podemos encontrar en cualquier sistema que tenga un motor, ya sea eléctrico, hidráulico o de cualquier otro tipo. Como ejemplos en la industria, podemos citar sistemas de transporte, bombas, ventiladores, compresores, grúas, prensas, cortadoras, trefiladoras, laminadoras, dentro de los llamados GMC (General Motion Control) y, por supuesto, en los ya conocidos CNC (control numérico computarizado) como ser robots, centros de mecanizado, tornos y fresas, que fueron los que vieron nacer a esta tecnología.
Mediante estos sistemas, se logra una mejora tanto en productividad como en eficiencia. En productividad, logrando sistemas más precisos y más rápidos, ganando en calidad y volumen. En cuanto a la eficiencia, estos sistemas permiten bajar notablemente los costos energéticos tanto en consumo, utilizando los llamados “sistemas regenerativos”, que son capaces de devolver energía a la red durante el frenado, como en factor de potencia, suavizando los arranques y paradas o mediante la utilización de rectificadores activos. También podemos lograr aumentar la vida útil de los sistemas mecánicos de las máquinas utilizando perfiles de movimiento más suaves y armónicos.
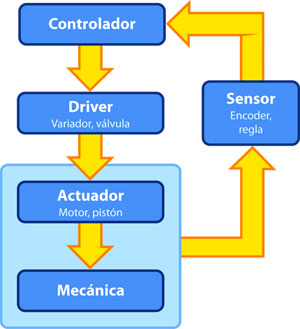
Figura 1
La arquitectura básica de un sistema de control de movimiento para un eje incluye un controlador que genera las configuraciones deseadas (trayectoria) y cierra los lazos de control, un driver o amplificador (por ejemplo, variador de velocidad, válvula hidráulica) que transforma la señal de control en una señal de potencia hacia el actuador que realiza el movimiento, los sensores que cierran el lazo, como ser encoders, resolvers o guías lineales y, finalmente, los sistemas mecánicos para transformar el movimiento del actuador en el movimiento deseado (tornillos, engranajes, correas, etc.).
Presente y futuro del mercado
Gracias al avance de la electrónica de potencia, este tipo de sistemas ha ganado mucho terreno dentro de las máquinas, y mediante el aporte de la informática, con el desarrollo de lenguajes orientados, en los últimos veinte años, han pasado de ser aplicaciones particulares a una tecnología estándar en la industria y un mercado atractivo para los principales fabricantes de equipos de automatización en los que podemos encontrar paletas de productos dedicadas a control de movimiento ya sea por desarrollo propio o por adquisición de empresas que ya venían desarrollando este tipo de sistemas. Por otro lado, también podemos observar, sobre todo en la última década, la aparición de nuevos competidores que se incorporan al mercado con propuestas innovadoras en el área, mostrando que esta es una tecnología en pleno crecimiento.
Respecto del mercado local, lamentablemente, no hay muchas mediciones. Aun así, se puede inferir que existe una porción arrastrada por la utilización de esta tecnología en las máquinas importadas, la cual es esperable que acompañe la tendencia mundial modulada por la cantidad de importaciones y, por otro lado, la correspondiente a la fabricación de máquinas nacionales que, en mi opinión, es la que tiene mayor terreno de crecimiento dado el potencial que tiene Argentina para salir a competir en tecnología de maquinaria a nivel mundial.
Presente y futuro de la tecnología
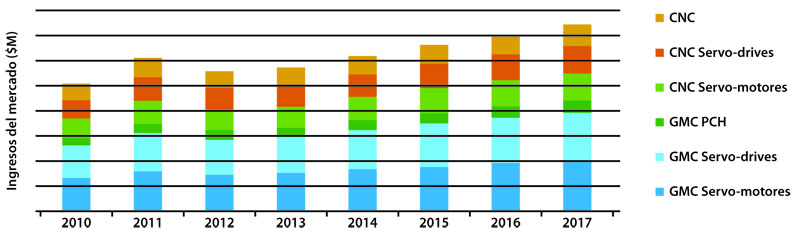
Figura 2. El mercado mundial de control de movimiento. Fuente: IHS, 2014
Los lazos, en control de movimiento, tienen una alta dinámica, con tiempos de establecimiento en el orden del milisegundo, y es por eso que la carrera por la velocidad de procesamiento y poder de cálculo duró un poco más que en otras áreas del control automático. Sin embargo, analizando los argumentos de venta que dan los fabricantes para sus nuevos productos, podemos concluir que en los próximos años los desafíos tecnológicos apuntarán hacia otra dirección.
Respecto de los controladores, si bien este es el componente en el que aún el poder de cálculo y velocidad sigue siendo importante, ya no es la característica principal y es probable que de aquí a diez años, aun los controladores más económicos tengan la capacidad de manejar varios ejes con tiempos de respuesta apropiados. En ese contexto, la competencia parecería darse en dos áreas: en la comunicación con los drives, logrando redes de alta velocidad y tiempo real sobre capas físicas estándar e incluso inalámbricas, y en las herramientas de programación y configuración que brindan al usuario. En este último aspecto, la forma en la que se integran los drivers, la integración con otros sistemas como HMI, SCADA, PLC, portabilidad del código, librerías específicas, softwares de ingeniería abiertos, estandarización y otros aspectos más propios de la informática que de la electrónica son los que, a mi entender, marcarán el camino en los próximos años.
En cuanto a los variadores (o drivers), los tiempos de muestreo de los lazos, la precisión en el control, la contaminación armónica, la regeneración de energía, y otros aspectos que hasta hace unos años eran elegidos por los fabricantes para destacar las propiedades de sus familias de productos, parecen darse por sentado en la actualidad.

Figura 3. El mercado mundial de motores de baja potencia. Distribuidos según el nivel de eficiencia y su participación en el mercado. De 2010 a 2017. Fuente: IHS, Junio 2013.
Hoy uno de los argumentos principales es la relación costo-beneficio para lo cual los fabricantes han ampliado la cantidad de modelos haciéndolos cada vez más específicos para cada aplicación, seguido por la capacidad de comunicación e integración con otros sistemas incluyendo, por supuesto, los controladores de movimiento.
En el mundo de los motores, la eficiencia energética parece ser el nombre del juego, desplazando a características como el momento de inercia, dinámica y volumen. Más aún, observando las proyecciones en el mercado, es probable que esta sea el camino en la evolución tecnológica de los motores en los próximos años
Finalmente, en el área de los sensores se puede ver una evolución importante en cuanto a nuevas técnicas de medición de posición absoluta, es decir, sistemas que no necesitan de un referenciado inicial luego del encendido.
Han florecido en el mercado sensores absolutos de alta precisión y velocidad con distintas técnicas: láser, con cámara, radares locales, magnéticos. Si bien estas técnicas de medición existen hace muchos años, la reducción de los costos de los componentes para poder fabricar estos sensores ha impulsado a muchas empresas a incorporarse en el mercado aumentando notablemente la oferta. Por otro lado, la comunicación integrada en el sensor también juega un rol importante ya que, al igual que en el caso de los drivers, esta comunicación está en el medio del lazo de control y, por lo tanto, debe ser rápida y confiable, una característica que diferencia las distintas gamas de productos.
|


