Motor de rotor jaula
El motor asincrónico con rotor jaula de ardillas es el más común en el mercado. Es relativamente barato y los costos de mantenimiento normalmente son bajos. Hay gran cantidad de fabricantes y variedad en cuanto a la calidad. Un motor de alta eficiencia representa una mayor inversión inicial pero luego nos brinda un ahorro energético importante durante su vida útil.
Otro aspecto a considerar es el diseño del rotor, ya que este influye directamente sobre la corriente y el torque de arranque. Para una misma potencia en kW, dos motores de distintos fabricantes pueden tener corrientes y torques de arranque muy diferentes.
El torque de arranque es un parámetro fundamental si se piensa utilizar el motor con un softstarter. Un motor que normalmente tiene un gran torque inicial en un arranque directo (DOL) va a permitir que el softstarter ajuste este parámetro al mínimo valor necesario requerido por la carga, reduciendo así la corriente de arranque. En cambio, un motor de bajo torque de arranque no deja demasiado paño para jugar, por lo cual la reducción de corriente de arranque será mínima.
El número de polos del motor también afecta directamente al torque de arranque. Un motor de dos polos, por ejemplo, tiene un torque de arranque menor que uno de cuatro polos.
Velocidad
 El número de polos también influye en la velocidad del motor. Un motor de dos polos será más rápido que uno de cuatro o seis. El otro parámetro que afecta directamente a la velocidad de rotación del motor es la frecuencia de red a la cual se conecta. El número de polos también influye en la velocidad del motor. Un motor de dos polos será más rápido que uno de cuatro o seis. El otro parámetro que afecta directamente a la velocidad de rotación del motor es la frecuencia de red a la cual se conecta.
A continuación, la fórmula utilizada para calcular dicha velocidad y un ejemplo.

n = velocidad en r.p.m.
f = frecuencia de red
p = número de polos
Ejemplo: para un motor de cuatro polos conectado a una frecuencia de red de 50 Hz

A esta velocidad se la conoce como “velocidad de sincronismo” y un motor asincrónico, como su nombre lo hace suponer, jamás podrá alcanzarla, ya sea uno de rotor jaula o de anillos rozantes.
Cuando el motor se encuentra descargado su velocidad es muy próxima a esta, pero a medida que la carga en el eje aumente esta velocidad caerá.
La diferencia entre la velocidad sincrónica y asincrónica se denomina “resbalamiento” y puede calcularse del siguiente modo:

s = resbalamiento (normalmente 3%)
n1 = velocidad de sincronismo
n = velocidad nominal (asincrónica)
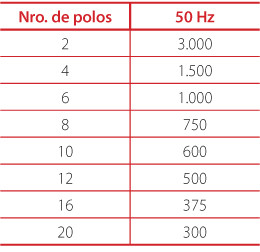
Esta es una tabla que muestra las distintas velocidades nominales en r.p.m. de los motores conectados en 50 Hz según el número de polos.
Tensión
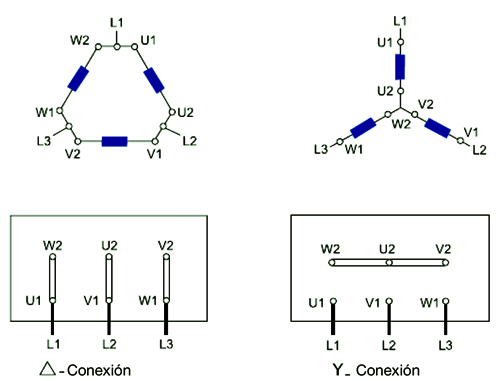 Los motores trifásicos normalmente pueden conectarse a dos niveles de tensión distintos en función de cómo se interconecten sus bobinados. Estas dos opciones son en estrella (Y) o en triángulo (D). Los motores trifásicos normalmente pueden conectarse a dos niveles de tensión distintos en función de cómo se interconecten sus bobinados. Estas dos opciones son en estrella (Y) o en triángulo (D).
Un motor conectado en triángulo recibe sobre cada bobinado la tensión de red, en cambio al conectarse en estrella, esta tensión se ve afectada por un valor igual a raíz de tres, es decir, se reduce 1,73 veces. Por lo tanto, un motor conectado a una red de 3x380 Vca tendrá una tensión aplicada sobre cada bobinado de 380 V si se conecta en triángulo, pero si está conectado en estrella la tensión que cae sobre cada bobinado será de 220 Vca.
Corriente
 La corriente nominal que podemos encontrar en la chapa característica de un motor es la corriente que el motor toma de la red cuando está completamente cargado y andando a velocidad nominal. Si la carga del motor es menor, la corriente también lo será y si el motor está sobrecargado, la corriente aumentará. La corriente nominal que podemos encontrar en la chapa característica de un motor es la corriente que el motor toma de la red cuando está completamente cargado y andando a velocidad nominal. Si la carga del motor es menor, la corriente también lo será y si el motor está sobrecargado, la corriente aumentará.
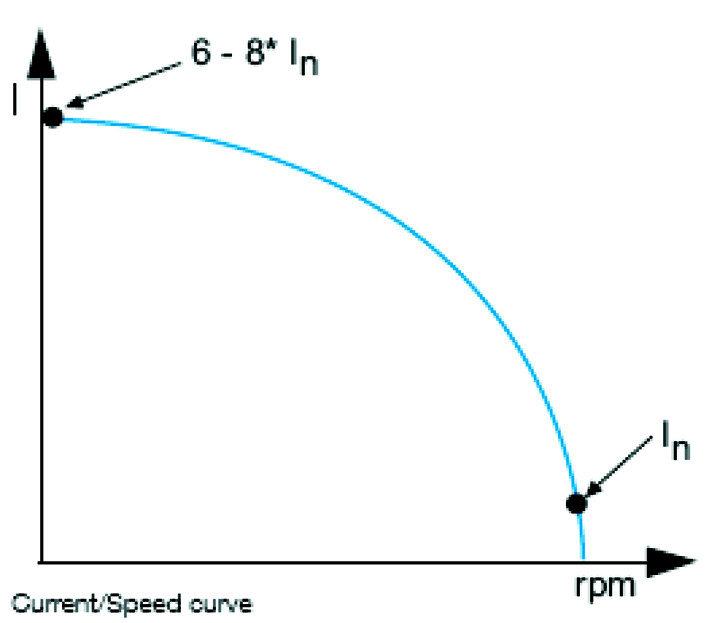
Durante un arranque directo el motor toma normalmente entre seis y ocho veces la corriente nominal, pero en ocasiones, este valor puede llegar a ser de diez veces.
Esto se puede apreciar claramente en un gráfico corriente/velocidad. Aquí se observa cómo la corriente es inicialmente alta y va disminuyendo a medida que el motor acelera. Para cuando el motor alcanza la velocidad de régimen, la corriente se establece en el valor de corriente nominal.
 Un motor consume potencia activa que luego transforma en movimiento rotacional del eje, pero también necesita potencia reactiva para magnetizarse, y esta no produce ninguna acción mecánica. Un motor consume potencia activa que luego transforma en movimiento rotacional del eje, pero también necesita potencia reactiva para magnetizarse, y esta no produce ninguna acción mecánica.
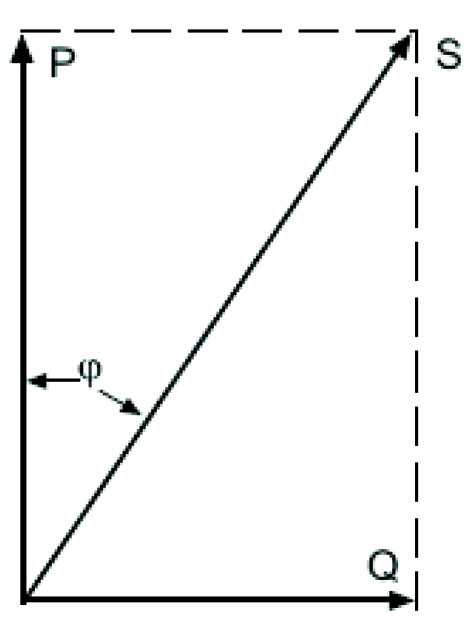
En el siguiente gráfico se representa la potencia activa (P) y la reactiva (Q), que juntas conforman la potencia aparente (S).
La diferencia entre entre la potencia activa P (kW) y la potencia aparente S (kVA) se conoce como “factor de potencia” y en particular en los motores es coincidente con el coseno φ.
Normalmente los motores tienen un cos φ de entre 0,7 y 0,9 pero esto varía según el tamaño del motor y el estado de carga del mismo. Los motores de gran potencia tienen habitualmente un mejor cos φ que los pequeños, es decir, más próximo a 1. Por otra parte, un motor descargado puede tener un pésimo cos φ, tal vez cercano a la mitad del valor que tendría a plena carga.
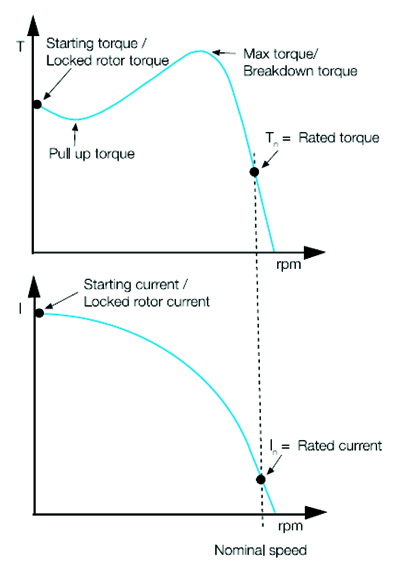
Torque
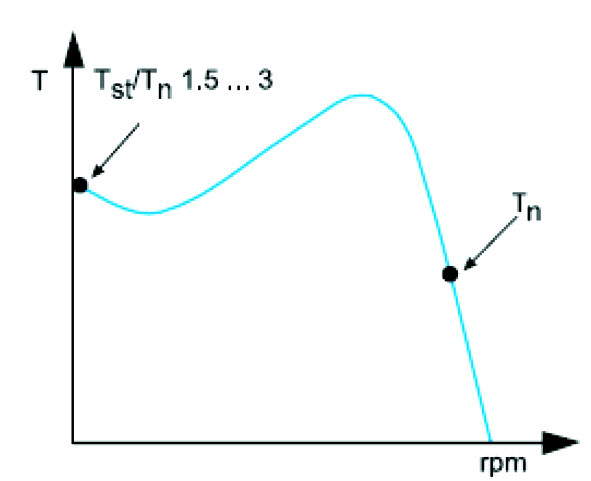 El torque de arranque varía sustancialmente con el tamaño del motor, por ejemplo, los motores chicos, de hasta 30 kW, tienen un torque de arranque que oscila entre 1,5 y 2,5 veces el torque nominal, mientras que en los motores medianos, digamos hasta 250 kW, la relación entre el torque de arranque y el torque nominal puede ser de dos a tres veces. El torque de arranque varía sustancialmente con el tamaño del motor, por ejemplo, los motores chicos, de hasta 30 kW, tienen un torque de arranque que oscila entre 1,5 y 2,5 veces el torque nominal, mientras que en los motores medianos, digamos hasta 250 kW, la relación entre el torque de arranque y el torque nominal puede ser de dos a tres veces.
Por el contrario, los motores realmente grandes suelen tener un torque de arranque muy bajo, incluso a veces menor que el torque nominal, por lo cual no pueden ser arrancados con plena carga, ni aún en un arranque directo.
Distintos estados de carga
Los motores se utilizan para una gran variedad de aplicaciones, tanto en el arranque como en régimen. Estas diferentes aplicaciones representan un estado de carga distinto para el motor en cada caso. Hay dos factores fundamentales a tener en cuenta a la hora de analizar una aplicación y son los siguientes: torque de la carga, también conocido como cupla resistente, y momento de inercia.
Torque de la carga
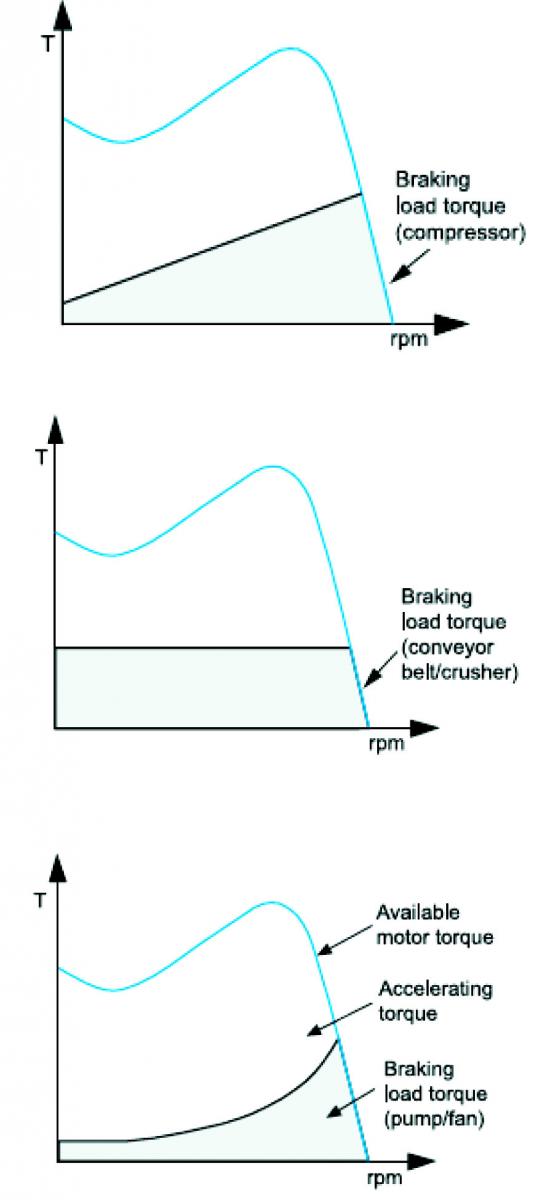 Es una fuerza que se manifiesta en el eje del motor e intenta frenarlo. Para acelerar, el motor debe ser más fuerte que la carga. La diferencia entre el torque disponible del motor y el torque de la carga es el torque de aceleración y es quien va a decir si el motor puede arrancar o no. Muchos métodos de arranque reducen el torque del motor y por lo tanto también el torque de aceleración, por consiguiente, el tiempo de arranque se incrementará. Es una fuerza que se manifiesta en el eje del motor e intenta frenarlo. Para acelerar, el motor debe ser más fuerte que la carga. La diferencia entre el torque disponible del motor y el torque de la carga es el torque de aceleración y es quien va a decir si el motor puede arrancar o no. Muchos métodos de arranque reducen el torque del motor y por lo tanto también el torque de aceleración, por consiguiente, el tiempo de arranque se incrementará.
Torque de aceleración = Torque disponible del motor – Torque de la carga
La curva de la carga puede tener diferentes características dependiendo de la aplicación.
Algunos de los tipos más comunes se pueden apreciar a la derecha.
Habitualmente en muchas aplicaciones pesadas se hace un arranque sin carga y luego esta se aplica cuando el motor alcanza la velocidad nominal. De este modo se puede reducir entre un 50 y 90% la cupla resistente que debe vencer el motor para arrancar comparado con un arranque a plena carga.
Momento de inercia
Es una representación teórica que involucra la masa de la carga conectada al eje del motor en forma de volante.
Normalmente a las aplicaciones con un bajo momento de inercia se la conoce como “arranque normal” y a las que tienen un momento de inercia alto se las denomina “arranque pesado”.
En un arranque normal el momento de inercia de la carga es bajo y el tiempo que el motor se toma hasta alcanzar su velocidad nominal es corto, en general inferior a los 10 segundos, por eso normalmente se protegen con relés de sobrecarga de clase de disparo 10 para tiempos de arranque cortos.
Entre las aplicaciones más comunes de arranques normales encontramos a las bombas, los compresores y las cintas transportadoras de poca longitud.
Los arranques pesados, por el contrario, deben enfrentar grandes momentos de inercia y por lo tanto, el tiempo de arranque necesario para alcanzar la velocidad nominal será elevado.
Esto hace que el consumo de corriente de arranque se prolongue en el tiempo y por consiguiente sea necesario tener una protección de sobrecarga con clase de disparo 30, ya que un relé de sobrecarga clase 10 actuaría por calentamiento en el arranque.
Un mayor momento de inercia va a tener como consecuencia un mayor tiempo de arranque para un mismo motor y un torque de carga.
En la siguiente tabla podemos ver distintos tiempos de arranque según el estado de carga y el método de arranque empleado. En la segunda parte de este artículo, que se publicará en la siguiente edición, haremos una breve descripción de los métodos de arranque más comunes para motores jaula de ardilla.
|

