En la primera y segunda parte de esta nota analizamos los conceptos básicos de un motor y sus diferentes métodos de arranque.
En esta última entrega nos enfocaremos de lleno en el arrancador suave, sus posibles conexiones, parametrización y coordinación.
Conexión “en línea”
Es la forma más comúnmente utilizada y es la más sencilla para conectar un arrancador suave.
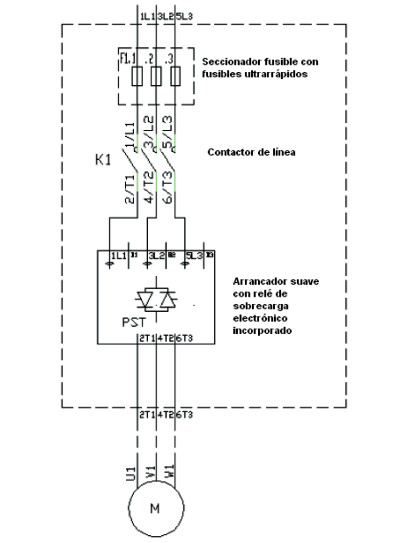
Todos los elementos se conectan en serie en sus tres fases pasando por el contactor de línea, el relé de sobrecarga externo (en caso de que el softstarter no lo tenga incorporado), el arrancador propiamente dicho y el motor. Adicionalmente, si se utiliza un seccionador fusible con fusibles ultrarrápidos para protección contra cortocircuitos también se conecta en serie y se ubicaría al inicio de toda esta cadena de elementos.
Todos los elementos involucrados deben ser seleccionados de acuerdo a la corriente nominal del motor, a excepción de los fusibles ultrarrápidos que se seleccionan por energía pasante.
Por ejemplo, para un motor de 100 A deberemos seleccionar un softstarter de 100 A, un contactor de 100 A, etc.
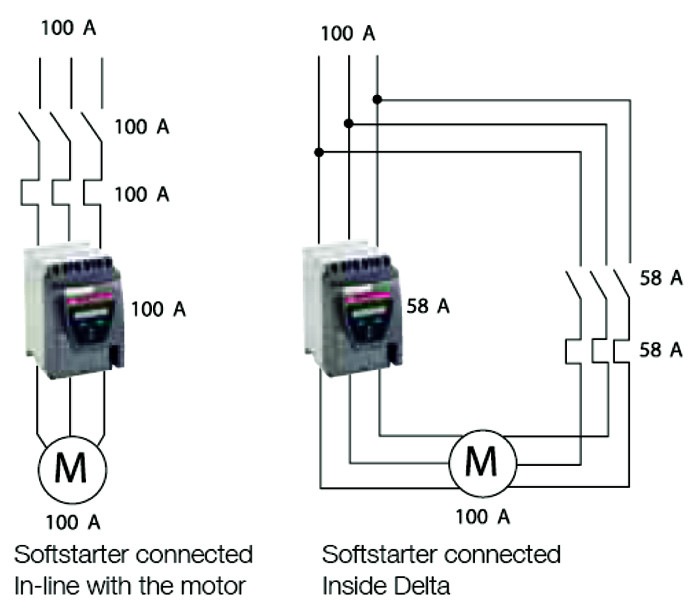
Conexión “dentro del triángulo”
 Es ideal para reemplazar arranques estrella-triángulo, donde los motores tienen acceso a los seis bornes y el cableado ya está realizado. Es ideal para reemplazar arranques estrella-triángulo, donde los motores tienen acceso a los seis bornes y el cableado ya está realizado.
Este método permite colocar al arrancador suave dentro del triángulo del motor, y de este modo reducir al 58% (1/√3) el calibre del mismo. Siguiendo el mismo criterio se puede reducir el calibre de los demás elementos involucrados obteniendo una solución más económica.
Por ejemplo, el mismo motor de 100 A analizado anteriormente puede ahora ser controlado por un arrancador suave de 58 A. De la misma manera, el contactor de línea, relé de sobrecarga, etc. pueden ser también de 58 A, de este modo se hace una solución mucho más eficiente en cuanto a costos.
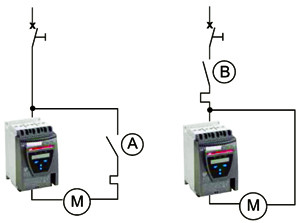
Toda la funcionalidad del arranque suave permanece inalterada ya sea que se conecte en línea o dentro del triángulo. Lo que se debe tener en cuenta es que para poder aprovechar la conexión dentro del triángulo, el softstarter debe ser controlado en tres fases y el motor debe tener acceso a los seis bornes de los bobinados. Muchas veces, si las distancias son largas el excesivo cableado hace que este tipo de conexión deje de ser económica y convenga una conexión en línea.
Cabe aclarar que si se requiere tener una aislación completa del softstarter, el contactor de línea debe colocarse en línea, fuera del triángulo como se indica en la figura B. En ese caso deberá ser apto para manejar los 100 A nominales del motor.
Contactor de línea y contactor de by-pass
 El contactor de línea no es necesario en sí mismo para el correcto funcionamiento del arrancador suave. Generalmente se utiliza como elemento de maniobra y para aislación. El contactor de línea no es necesario en sí mismo para el correcto funcionamiento del arrancador suave. Generalmente se utiliza como elemento de maniobra y para aislación.
Por ejemplo, cuando el softstarter acusa una falla por sobrecarga, los tiristores dejarán de conducir y el motor se detendrá, pero en bornes superiores del arrancador vamos a seguir teniendo tensión. Esto se soluciona instalando un contactor de línea aguas arriba del arrancador suave y se lo hace abrir en caso de falla. Esto puede hacerse muy fácilmente utilizando los contactos de falla del arrancador suave comandando la bobina del contactor a través de un relé auxiliar si fuera necesario.
En este caso, el contactor de línea debe ser seleccionado para una categoría de empleo AC-3 ya que debe manejar la corriente de arranque del motor y abrirla si fuera necesario en caso de emergencia.
El contactor de by-pass, por el contrario, se selecciona para una categoría AC-1 ya que no va a manejar la corriente de arranque del motor sino que va a entrar en funcionamiento una vez que el motor alcance el régimen permanente y la corriente sea la nominal.
Su función es muy distinta. Es el encargado de desconectar a los tiristores una vez que estos han concluido su trabajo, es decir, una vez que finalizó la rampa de arranque. En el momento en que se alcanza el “tope de rampa” se cierra un contacto denominado TOR (top of ramp) que será quien me permita dar señal de cierre al contactor de by-pass.
De este modo se obtienen varios beneficios.
Los tiristores, en cada cruce por cero de la senoide, se disparan generando ruido eléctrico. Al desconectarlos a través del by-pass este inconveniente desaparece. Otra ventaja importante es que se reduce drásticamente la disipación de energía. Como sabemos, todos los semiconductores generan mucho calor y los tiristores no son la excepción, de modo que al desconectarlos durante el funcionamiento normal del motor estamos reduciendo al mínimo la potencia disipada dentro del tablero, bajando la temperatura y posiblemente esto nos permite prescindir de una ventilación forzada.
Adicionalmente, esto nos dará la posibilidad de realizar un mayor número de arranques por hora y dado que los tiristores están desconectados durante el funcionamiento del motor su vida útil y por consiguiente la del arrancador suave será mucho mayor.
Es importante aclarar que si bien los tiristores son desconectados el softstarter sigue monitorizando la corriente y todas las protecciones del motor continúan funcionando normalmente.
Al dar señal de parada al arrancador suave el by-pass se desconecta y los tiristores vuelven a realizar su trabajo, pero esta vez controlando la rampa de detención del motor.
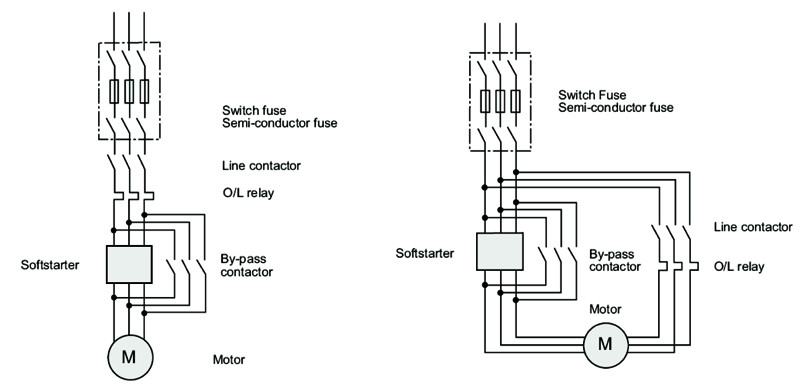
En la figura anterior se ven todos los elementos involucrados en una salida a motor con arrancador suave, ya sea que se utilice una conexión en línea o una conexión dentro del triángulo.
Actualmente muchos by-pass tienen incorporados varios de estos elementos.
Por ejemplo, los arrancadores ABB PSE, PST y PSTB cuentan con un relé electrónico de sobrecarga incorporado, por lo cual, en este diagrama no sería necesario el relé de sobrecarga externo.
Por otra parte, los arrancadores ABB PSR, PSE y PSTB cuentan con un contactor de by-pass incorporado, por lo cual no es necesario agregar un contactor de by-pass externo.
Parametrización de un arrancador suave
 A continuación haremos una breve descripción de los parámetros más importantes que se deben ajustar en un arrancador suave. No todos los parámetros mencionados están disponibles en todos los arrancadores y algunos otros parámetros no mencionados pueden encontrarse según el tipo, marca y modelo de arrancador. Los ajustes pueden realizarse mediante potenciómetros, dip switches, teclado o vía software. A continuación haremos una breve descripción de los parámetros más importantes que se deben ajustar en un arrancador suave. No todos los parámetros mencionados están disponibles en todos los arrancadores y algunos otros parámetros no mencionados pueden encontrarse según el tipo, marca y modelo de arrancador. Los ajustes pueden realizarse mediante potenciómetros, dip switches, teclado o vía software.
Rampa de arranque
En este parámetro lo que se ajusta es el tiempo que dura dicha rampa de arranque, es decir, el tiempo que transcurre mientras los tiristores aplican la tensión inicial al motor y la incrementan hasta alcanzar la tensión nominal. La rampa de arranque no debe ser muy larga ya que esto genera un calentamiento innecesario del motor y un riesgo de disparo del relé de sobrecarga.
Un error muy común es pensar que este parámetro ajusta el tiempo de arranque del motor. El tiempo de arranque del motor es el tiempo que demora en alcanzar la velocidad nominal. Si el motor está muy cargado probablemente el tiempo de arranque será mayor al tiempo de rampa, es decir, una vez aplicada la tensión nominal el motor continuará acelerando hasta alcanzar la velocidad de régimen, mientras que si el motor se encuentra descargado muy probablemente alcance la velocidad nominal antes de finalizar la rampa de arranque, con lo cual el tiempo de rampa sería mayor que el tiempo de arranque.
Rampa de parada
Se usa especialmente cuando se necesita una detención suave del motor, por ejemplo, en una bomba o cinta transportadora cargada de objetos frágiles.
En este parámetro lo que se ajusta es el tiempo que tardan los tiristores en reducir la tensión nominal aplicada al motor hasta un valor de tensión final preestablecido. Si el tiempo de rampa se ajusta a cero se obtiene una parada libre, sin control.
Tensión inicial
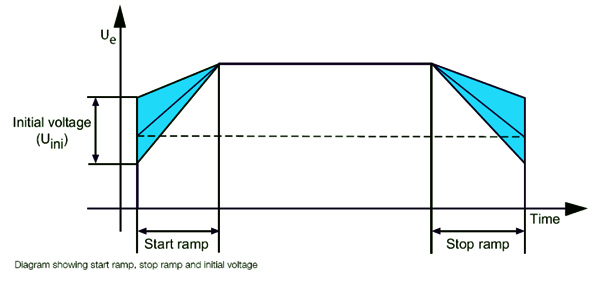 Es el valor de tensión desde el cual comienza la rampa de arranque. Este dependerá de la carga que se intente arrancar. Una carga muy pesada requerirá un valor de tensión inicial bastante elevado, mientras que en una carga liviana no será necesario. Es el valor de tensión desde el cual comienza la rampa de arranque. Este dependerá de la carga que se intente arrancar. Una carga muy pesada requerirá un valor de tensión inicial bastante elevado, mientras que en una carga liviana no será necesario.
Es sabido que el torque depende cuadráticamente de la tensión, entonces si ajustamos el valor de tensión inicial en un 20%, el valor del torque caerá a un 4% y el motor no arrancará (0,2 x 0,2 = 0,04).
Es muy importante regular este valor de tensión inicial adecuadamente para no generar calentamientos indeseados en el motor mientras intenta arrancar.
Tensión final
Es el valor de tensión en el cual finaliza la rampa de parada y se corta la alimentación al motor.
Corriente nominal
Este parámetro permite ajustar la corriente nominal del arrancador a la real consumida por el motor.
Este parámetro va a afectar a otros relacionados con la corriente como, por ejemplo, el valor de disparo del relé de sobrecarga, la corriente límite para el arranque y la corriente de rotor bloqueado.
Control de torque
Es una función que va a controlar el torque del motor en lugar de controlar la tensión aplicada. Es especialmente útil para detener bombas evitando el golpe de ariete que se genera en una parada libre y también, aunque en menor medida, en una parada suave controlada por tensión. Los arrancadores que poseen control de torque permiten seleccionar el modo de rampa de tensión o rampa de torque, tanto en el arranque como en la parada.
Límite de corriente
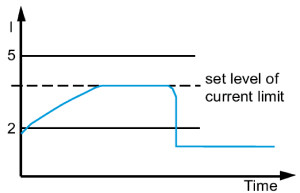   Este parámetro se utiliza en aplicaciones en que la corriente de arranque no debe superar un valor preestablecido, o también en arranques pesados en los que se hace muy difícil obtener un buen resultado controlando únicamente la tensión inicial y el tiempo de rampa de arranque. Este parámetro se utiliza en aplicaciones en que la corriente de arranque no debe superar un valor preestablecido, o también en arranques pesados en los que se hace muy difícil obtener un buen resultado controlando únicamente la tensión inicial y el tiempo de rampa de arranque.
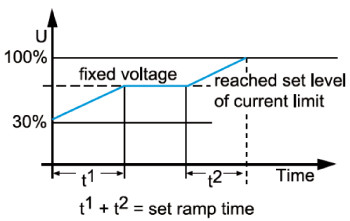
La rampa de arranque se inicia normalmente incrementando la tensión y la corriente, pero cuando la corriente alcanza el valor límite la tensión deja de incrementarse por un tiempo hasta que la corriente se reduzca y de este modo continúa la rampa de tensión sin sobrepasar el límite de corriente.
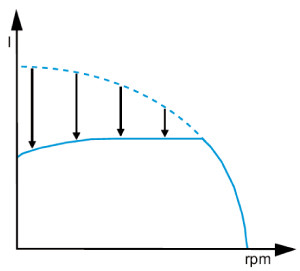
Como la corriente máxima (arranque directo) se va reduciendo a medida que aumenta la velocidad del motor, es posible ir incrementando la tensión gradualmente sin superar la corriente límite.
En la figura anterior se observa cómo la rampa de tensión queda segmentada en tres partes. Una inicial, en donde se incrementa la tensión; una segunda etapa, en donde la tensión permanece constante en el tiempo a fin de no exceder el límite de corriente, y una tercera parte en que la rampa de tensión continúa incrementándose hasta alcanzar la tensión nominal.
Abajo podemos observar el comportamiento de la corriente que comenzará incrementándose hasta que al llegar al valor límite se mantendrá constante, y finalmente caerá al valor de corriente nominal una vez finalizado el arranque cuando el motor haya alcanzado la velocidad de régimen.
Coordinación
  Cuando hablamos de coordinación en una salida a motor nos referimos a un conjunto de aparatos eléctricos que utilizados en conjunto garantizan la protección de las personas y los mismos aparatos eléctricos, incluso ante fallas. Cuando hablamos de coordinación en una salida a motor nos referimos a un conjunto de aparatos eléctricos que utilizados en conjunto garantizan la protección de las personas y los mismos aparatos eléctricos, incluso ante fallas.
El conjunto de elementos coordinados debe cumplir con cuatro funciones básicas que se detallan a continuación:
-
Protección contra sobrecargas
-
Control del motor
-
Protección contra cortocircuitos
-
Aislación
La protección contra sobrecargas es responsable de proteger motor y cables contra sobrecalentamientos generados por cualquier corriente comprendida entre la nominal y la corriente de rotor bloqueado. Este dispositivo deberá enviar una señal de disparo a un elemento capaz de desconectar al motor de la red. Normalmente para ello se utiliza al contactor de línea.
El control del motor se refiere a la conexión y desconexión del mismo y normalmente quien se encarga de esta función es el contactor de línea.
La protección contra cortocircuito será responsable de disipar todas las corrientes que se encuentren por encima de la corriente de rotor bloqueado, por ejemplo corrientes de cortocircuito.
Cuando mencionamos aislación nos referimos a que debe existir un elemento que garantice una aislación en aire para seguridad del personal operador.
La norma IEC 60947-4-2 define dos tipos de coordinación de acuerdo al nivel de continuidad de servicio esperado:
Coordinación tipo 1: La coordinación tipo 1 establece que bajo una condición de cortocircuito no se deben generar daños a las personas ni a la instalación, pero los dispositivos de maniobra afectados deberán ser reparados o reemplazados para volver a prestar servicio.
Coordinación tipo 2: La coordinación tipo 2 establece que bajo una condición de cortocircuito no se deben generar daños a las personas ni a la instalación, pero los elementos coordinados deben seguir funcionando correctamente garantizando así la continuidad del servicio.
A continuación un esquema de salida a motor con arranque suave recomendado por ABB para garantizar coordinación tipo 2.
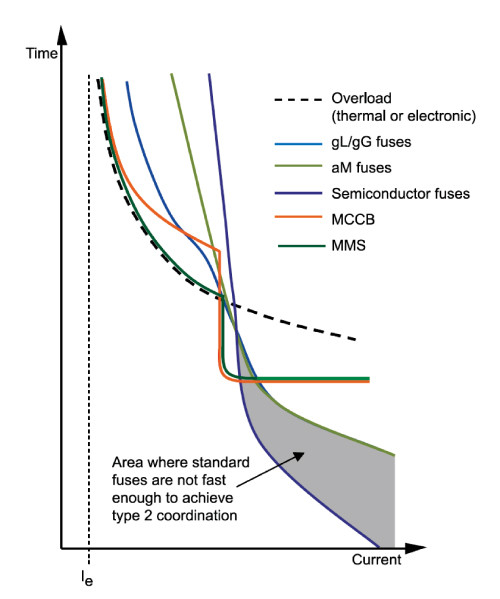
Para poder garantizar una coordinación tipo 2 deben utilizarse fusibles ultrarrápidos, ya que son los únicos elementos capaces de proteger al softstarter ante un cortocircuito. El arrancador suave tiene internamente tiristores que son semiconductores y la velocidad de apertura de un interruptor es demasiado lenta para protegerlos. Lo mismo sucede con un fusible común. No es lo suficientemente rápido para abrir el cortocircuito antes de que se destruyan los tiristores del arrancador suave.
Las coordinaciones garantizadas por ABB se basan en ensayos realizados en laboratorio y los fusibles que se indican en las tablas de coordinación están calculados para limitar la energía pasante (I2t) que es la única forma de garantizar la protección del arrancador.
A continuación podemos ver las distintas curvas de los elementos de protección más utilizados.
A lo largo de estas tres entregas hemos repasado algunos conceptos básicos de motores, diferentes métodos de arranque y particularidades de los arrancadores suaves.
Este último método viene creciendo gradualmente en base instalada y la tendencia indica que pronto será el más utilizado en el mercado.
ABB está preparada para enfrentar este desafío con sus tres líneas actuales (PSR, PSE y PST) y creará un nuevo concepto en arranques suaves presentando la nueva familia PSTX con la capacidad tecnológica e innovación de alta calidad que la caracteriza. |

