
Es inevitable pensar en servomotores cuando se necesitan máquinas de alta producción y precisión. Sin embargo, surgen muchas dudas acerca de este tipo de equipamiento. En este informe técnico, indagaremos sobre su concepto, características y funcionamientos. ¿Qué son?, ¿qué los hace tan especiales?, ¿qué tipo de control se puede tener sobre ellos?, ¿cómo debemos aplicar esta tecnología?
Definición
Se podría decir que un servomotor es un motor, pero con varias características especiales.
La principal propiedad es que cuenta con un sistema de realimentación (encoder), el cual le indica al servo drive (controlador del servomotor) la posición en la que se encuentra el eje del servomotor y le corrija la posición, en caso que no fuese la correcta. De este modo, puede enmendar (en tiempo real) los errores de posición, y obtener una muy alta precisión.
Para tener una referencia del nivel de precisión que se puede conseguir, los servomotores de Micro pueden alcanzar una resolución de un millón doscientos ochenta mil (1.280.000) pulsos por vuelta.
Características
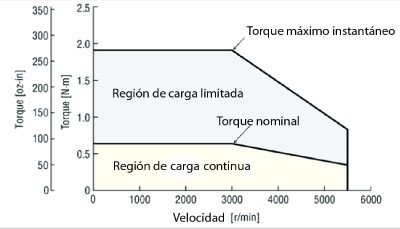
Curva torque característica de un servomotor
Además de su precisión, otra de las propiedades logrables es la capacidad de mantener un torque constante en toda su gama de revoluciones (hasta 3.000 rpm). Esta característica los diferencia de los motores asincrónicos convencionales, puesto que si quisiéramos mantener la posición en un motor común, necesitaríamos recurrir a dispositivos adicionales como ser frenos, frenos de polvo magnético, conjuntos frenos-embrague, reductores de velocidad, etcétera.
En cambio, un servomotor aplicaría todo su torque disponible para conservar la posición de la carga, independiente de la velocidad de funcionamiento del servomotor, es decir, que se puede conservar la posición de la carga a cero revoluciones por minuto (0 rpm) sin la necesidad de dispositivos agregados. Esta facultad también es aplicable para mover cargas a velocidades bajas.
Conjuntamente, se suma otra condición particular referida a los niveles de aceleración y desaceleración que se pueden adquirir, teniendo en cuenta que el torque es una relación entre el momento de inercia de la carga y la aceleración angular.
T = I*a
- T: torque (newton metro —Nm—)
- I: momento de inercia (kilo-metro cuadrado —kg-m2—)
- a: aceleración angular (radián por segundo al cuadrado —rad/seg2—)
En esta relación, se logra ver que para una aceleración mayor con el mismo nivel de carga, precisaríamos más torque para poder mover la misma carga.
Los servomotores soportan hasta un trescientos por ciento (300%) de sobrecarga por un determinado período de tiempo, y esto les posibilita romper la inercia con aceleraciones/desaceleraciones bruscas.
Funcionamiento
 Una de las inquietudes más frecuentes que surge al momento de hablar de servomotores es conocer la manera de controlarlos y la forma de indicarles la posición que se desea alcanzar, así como la velocidad. Una de las inquietudes más frecuentes que surge al momento de hablar de servomotores es conocer la manera de controlarlos y la forma de indicarles la posición que se desea alcanzar, así como la velocidad.
Para ello, existen distintos métodos de control. El más común y más utilizado (por su sencillez) es el control por pulso y frecuencia.
¿Qué implica este procedimiento? Por lo general, hablamos de milímetros, pulgadas, metros, etcétera, pero el servo drive no entiende qué significan estas magnitudes, ya que solo interpreta los pulsos que recibe y con qué velocidad los recibe (frecuencia).
Supongamos que nuestro sistema mecánico avanza cien milímetros —100 mm— (por cada vuelta del motor) y el motor da una vuelta cada mil pulsos recibidos, o sea, que si le entregamos mil pulsos al servo drive, desde un controlador superior como ser un controlador lógico programable, el motor hará que la carga avance cien milímetros. Ahora bien, si precisamos que avance doscientos milímetros (200 mm), tendríamos que enviarle dos mil pulsos al servo drive. Y si requerimos que avance trescientos milímetros (300 mm), esta vez deberíamos entregarle tres mil. De este modo, estaremos controlando la posición del servomotor de una manera muy sencilla.
Por otro lado, solo nos faltaría controlar la velocidad del servomotor. Esta tarea es simple, porque únicamente necesitaríamos modificar la frecuencia con la que se entregan los pulsos.
Si la frecuencia con la que se generan los pulsos es mayor, la carga logrará la posición deseada rápidamente. A diferencia, si la frecuencia es menor, la carga tardará más tiempo en alcanzar la posición.
Para este tipo de control, se desarrolla software que implica herramientas diferentes, para poder controlar servomotores de forma bastante sencilla. De esta manera, uno puede controlar un servomotor con tan solo una línea de programación, consiguiendo toda la precisión y velocidad que el servo puede brindar.
|


