 Figura 1. Distintas puestas a tierra, diferentes a la referencia del sistema Ante la necesidad de contar con una protección eficaz y económicamente viable para los equipos de monitoreo instalados en campo, se decide diseñar, simular e implementar una electrónica capaz de resistir las descargas atmosféricas indirectas recibidas tanto por la alimentación como por la medición. En el presente trabajo se explicarán las premisas de las cuales se partió así como resultados experimentales de su aplicación. Se diseñó íntegramente un sistema de protección, partiendo de cálculos y comprobándolos mediante simulaciones de Spice, para luego finalizar con la construcción e implementación de un prototipo. Figura 1. Distintas puestas a tierra, diferentes a la referencia del sistema Ante la necesidad de contar con una protección eficaz y económicamente viable para los equipos de monitoreo instalados en campo, se decide diseñar, simular e implementar una electrónica capaz de resistir las descargas atmosféricas indirectas recibidas tanto por la alimentación como por la medición. En el presente trabajo se explicarán las premisas de las cuales se partió así como resultados experimentales de su aplicación. Se diseñó íntegramente un sistema de protección, partiendo de cálculos y comprobándolos mediante simulaciones de Spice, para luego finalizar con la construcción e implementación de un prototipo.
Palabras clave: Protecciones. Descargas atmosféricas. Rayos.
Introducción
Varias empresas, entre ellas las pertenecientes a la industria petrolera, requieren para su funcionamiento cotidiano, equipos instalados en campo. Estos equipos han evolucionado incorporando mayor cantidad de electrónica, la cual es menos robusta frente a descargas atmosféricas que su predecesora mecánica. En el presente trabajo se realiza un análisis completo de las razones por las cuales las descargas atmosféricas afectan estas nuevas tecnologías, cómo se producen los fallos catastróficos en los equipos que comparten tierra (alimentación y descarga) y las acciones correctivas se podrían tomar como alternativa a la protección.
La problemática de proteger circuitos eléctricos de las descargas atmosféricas no es nueva, pero cuando se intenta proteger sistemas en campo, las problemáticas son diferentes debido a que normalmente son equipos que no se encuentran aislados de tierra. Por este motivo, las protecciones estándar del mercado suelen fallar al evitar que los equipos reciban descargas eléctricas peligrosas, y dado que los equipos se alimentan con transformador exclusivo para ellos, carecen del filtrado natural que proveen los tendidos eléctricos de mayor envergadura.
Este tipo de equipos no se encuentran aislados de tierra y las variables que miden se encuentran referenciadas a diversos puntos, diferentes de la referencia que utiliza el equipo para su protección. Un caso típico de esta problemática se observa en la figura 1. Es por ello que la protección tiene que poder proteger vivo, neutro y tierra de referencia indistintamente, lo cual no sucede en las protecciones que se encuentran comercialmente, que solo ofrecen una protección del tipo vivo contra tierra y neutro contra tierra. En dichas protecciones, cualquier descarga que ingrese por la tierra de referencia continúa su camino hasta que descarga en el interior del equipo sobre su eslabón más débil.
Las protecciones comerciales contemplan la existencia de una impedancia propia de la red y la utilizan de manera complementaria al circuito de protección para funcionar adecuadamente. Sin embargo, en una instalación de campo la situación difiere de este escenario, dado que usualmente la alimentación proviene de un transformador de media tensión exclusivo para el equipo, de un generador eléctrico de combustión interna exclusivo para tal fin. Por lo tanto, la impedancia del sistema es muy baja. Ello obliga a calcular una protección rápida, eficiente y con capacidad de absorber mayor energía que las protecciones comerciales existentes. 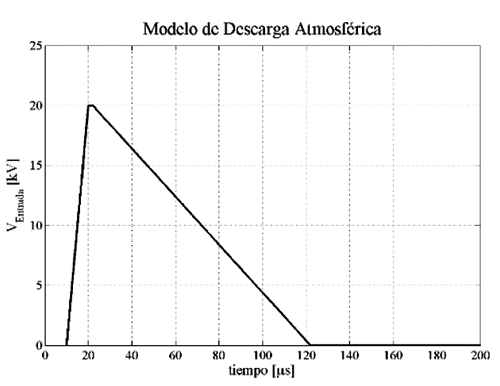 Figura 2. Descarga atmósferica del tipo 10/100 microsegundos Figura 2. Descarga atmósferica del tipo 10/100 microsegundos
Efectos de las descargas atmosféricas
Del análisis de fallas repetitivas en los equipos instalados en campo, se desprende que estos reciben frecuentes descargas eléctricas de gran energía. De la observación del nivel de destrucción presente en los equipos, se concluye que estas descargas eléctricas solo pueden ser generadas por fenómenos atmosféricos, y que en ninguno de los casos fueron por impactos directos, sino por inducción en la red de tendido eléctrico o por dispersión a través del suelo.
Dado que todo el equipo se encontraba conectado en varios puntos distintos a tierra, se procedió a investigar la naturaleza de las causas de los daños producidos por estas descargas, teniendo en cuenta una estructura similar a la observada en la figura 1.
Al producirse una descarga se presentarán grandes diferencias de potencial entre los terminales de salida del rectificador y/o entre estos y la conexión a tierra del equipo. Esta diferencia de potencial hará circular por los cables una gran corriente debido a la alta conductividad de estos respecto de la tierra. Según Micheloud, Aguirre y Nevmirosky (2008), se concluye que los conductores generan un camino ideal para facilitar la circulación de la corriente de la descarga atmosférica.
La problemática a resolver por una protección paralelo reside en que debe absorber en un tiempo muy corto (del orden de los microsegundos) toda la energía de la descarga, presentando una impedancia respecto a la referencia lo suficientemente baja como para que la tensión entre sus bornes no supere la máxima tolerada por el equipo a proteger.
En el presente trabajo se analiza la situación particular en la cual la referencia no puede comportarse como la descarga a tierra normal. Esto se debe a que durante la dispersión de la descarga atmosférica por el suelo, los valores de referencia tienden a diferir de su valor nominal de cero volts en varios órdenes de magnitud, oscilando entre cientos y miles de volts. Por lo tanto, se decidió implementar una protección en estrella entre vivo, neutro y tierra, manteniendo al equipo aislado de tierra. Para la caracterización de la descarga atmosférica se aplicó el estándar IEC 61643-11 (ver figura 2).
Este define descargas de 30/350 microsegundos para impactos directos, 8/20 para impactos indirectos y 1,2/50 para las sobretensiones inducidas. Durante el análisis de fallas se encontró que en este tipo de equipos las fallas provienen de una combinación de los tres casos. Por lo tanto, haciendo coincidir las simulaciones con los resultados experimentales, se halló que la caracterización que más se asemeja es la de descargas del tipo 10/100 microsegundos.
Por último, el diseño no solo debe evitar que una descarga genere tensiones y corrientes peligrosas, sino que mientras estas no existan, el sistema debe comportarse como un conductor. 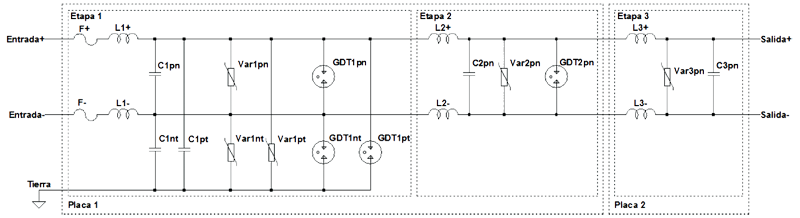 Figura 3. Diagrama esquemático del circuito que se realizará Figura 3. Diagrama esquemático del circuito que se realizará
Diseño del sistema de protección
Requerimientos de diseño
Los requerimientos utilizados en la etapa de diseño son los que se describen a continuación. El circuito deberá ser colocado en serie con un equipo que presenta una alta impedancia de entrada, operando con tensiones de corriente continua de hasta 150 volts y corrientes máximas de cuatro miliamperes. En todo momento en el que el equipo se encuentre operando en condiciones normales, la protección deberá ser transparente.
Asimismo, se deberán utilizar dentro de lo posible componentes off-the-shelf. Ello reducirá los costos y facilitará los procesos de producción y mantenimiento.
Dado que el circuito será diseñado como un elemento consumible (caso contrario, los costos superarían con creces los límites de este proyecto), se debe llegar a una relación de compromiso entre los costos de producción y los costos de mantenimiento de los equipos en campo. Una gran vida útil reducirá los costos de mantenimiento pero aumentará los costos de producción, y viceversa.
Dado que el circuito será un elemento consumible, este deberá ser de fácil instalación en campo, adecuándose a los equipos existentes.
El costo final de producción y el volumen del circuito deberán ser acordes a los márgenes establecidos por la aplicación.
Topología utilizada y detalle del funcionamiento
Como primer paso en el diseño del circuito, se debe elegir un dispositivo con una alta capacidad de absorción de energía. Los descargadores gaseosos serían la opción ideal para utilizar en este circuito ya que son capaces de conducir grandes cantidades de corriente presentando una muy baja tensión debido a la baja impedancia del gas ionizado. Además, en los últimos años los avances tecnológicos han permitido que las velocidades de activación de estos dispositivos se reduzcan drásticamente, pasando de milisegundos a decenas de nanosegundos; esto ha permitido realizar implementaciones con una menor cantidad de componentes que se encarguen de absorber y almacenar la energía mientras el descargador gaseoso logra activarse, ya que el tiempo de activación actual del descargador es tres órdenes de magnitud inferior al periodo de la señal emitida por la descarga atmosférica (figura 2). Sin embargo, dado que el sistema de protección a diseñar tiene como objetivo su instalación en sistemas remotos en campo, colocar un descargador gaseoso como componente principal sería la mejor opción solo a primera vista. La activación del descargador provocaría prácticamente un cortocircuito entre sus terminales, permitiendo la circulación de varios miles de amperes entre los terminales de entrada del circuito de protección. Esto provocaría la activación del resto de los sistemas de protección del equipo de campo (v.g. fusibles, llaves interruptoras, etc.), lo que obligaría ante cualquier evento atmosférico menor a tener que ir a la locación y realizar tareas de mantenimiento para restablecer manualmente el funcionamiento.
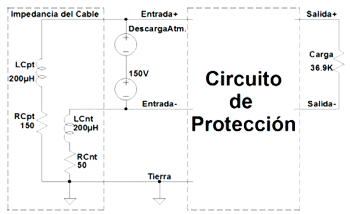 Figura 4. Entorno de simulación del circuito Por lo tanto, la estrategia llevada a cabo será la de realizar un diseño centrado en los varistores y su capacidad de absorber energía, ya que presentan una respuesta rápida (limitada solo por la inductancia de sus conexiones) y una alta capacidad de corriente. Se utilizará como parámetro de diseño la vida útil de los varistores para luego determinar la vida útil del circuito que realiza la protección. El diseño permitirá que los descargadores gaseosos se activen únicamente cuando los varistores hayan llegado al fin de su vida útil. De esta manera, cuando el descargador gaseoso active las protecciones extra del equipo en campo, un equipo técnico autorizado se deberá acercar a la locación para resetear las protecciones del equipo y cambiar el circuito de protección que llegó al fin de su vida útil. Por lo tanto el circuito deberá ser implementado de manera modular, permitiendo que sea reemplazado en el equipo con facilidad. Figura 4. Entorno de simulación del circuito Por lo tanto, la estrategia llevada a cabo será la de realizar un diseño centrado en los varistores y su capacidad de absorber energía, ya que presentan una respuesta rápida (limitada solo por la inductancia de sus conexiones) y una alta capacidad de corriente. Se utilizará como parámetro de diseño la vida útil de los varistores para luego determinar la vida útil del circuito que realiza la protección. El diseño permitirá que los descargadores gaseosos se activen únicamente cuando los varistores hayan llegado al fin de su vida útil. De esta manera, cuando el descargador gaseoso active las protecciones extra del equipo en campo, un equipo técnico autorizado se deberá acercar a la locación para resetear las protecciones del equipo y cambiar el circuito de protección que llegó al fin de su vida útil. Por lo tanto el circuito deberá ser implementado de manera modular, permitiendo que sea reemplazado en el equipo con facilidad.
A la entrada del circuito se colocarán fusibles debidamente seleccionados para que solo se activen cuando el descargador gaseoso se active. De esta manera, quedará un registro fiel de que el descargador gaseoso fue el que se activó (y activó las demás protecciones del equipo de campo), y el circuito de protección llegó al final de su vida útil.
Para su correcto funcionamiento, el varistor requiere una alta impedancia serie, de manera que la caída de tensión en dicha impedancia sea alta cuando el varistor conduzca corriente. Sin embargo, durante el funcionamiento normal del circuito, esta impedancia debe ser despreciable, ya que la protección debe ser transparente en todo momento en el que no haya una descarga. Es por ello que se coloca una inductancia serie en las líneas de entrada del circuito, que presentarán una impedancia dependiente de la frecuencia. En funcionamiento normal, la inductancia presentará una impedancia muy baja debido a que la señal de trabajo es una señal de corriente continua o ligeramente variable.
Si la señal nominal de trabajo fuera una señal de corriente alterna, las inductancias de ambos bornes deberían encontrarse acopladas en el mismo núcleo magnético, de manera de presentar inductancia únicamente frente a perturbaciones de modo diferencial. La impedancia serie de las inductancias contribuirá a limitar la densidad de corriente que circulará por el varistor y el capacitor, logrando una reducción de la tensión resultante en el nodo del varistor. Dentro de una misma etapa, el modelo de inductor debe ser el mismo en los dos caminos de la señal (Li+ = Li-) para mantener la simetría entre las líneas de tensión.
Agregar un capacitor en paralelo para formar un filtro pasabajos LC permite maximizar el tiempo de respuesta del varistor al demorar el pulso de entrada y reducir el tiempo de subida de la tensión y la corriente en los bornes del varistor. Ello permite al varistor actuar de manera más eficiente, ya que desviará una mayor cantidad de energía hacia la tierra o el borne negativo, dependiendo de la polaridad de la descarga.
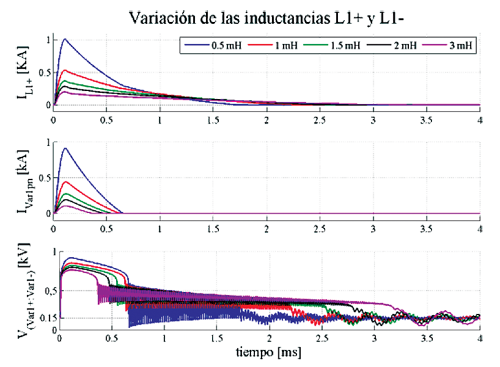 Figura 5. Corriente en el inductor y tensión y corriente en el varistor paramétricos con el valor de inductancia (etapa uno). Luego de la descarga, la tensión y corriente se estabilizan en los valores normales de trabajo La descarga atmosférica puede presentarse entre cualquier par de cables en la entrada del circuito de protección, y con cualquier polaridad. Por lo tanto, todas las combinaciones posibles deben ser tenidas en cuenta en el diseño. Es por ello que las protecciones paralelo se colocan en las tres combinaciones posibles (positivo-negativo, positivo-tierra y negativo-tierra) en la primer etapa, logrando una protección simétrica. Figura 5. Corriente en el inductor y tensión y corriente en el varistor paramétricos con el valor de inductancia (etapa uno). Luego de la descarga, la tensión y corriente se estabilizan en los valores normales de trabajo La descarga atmosférica puede presentarse entre cualquier par de cables en la entrada del circuito de protección, y con cualquier polaridad. Por lo tanto, todas las combinaciones posibles deben ser tenidas en cuenta en el diseño. Es por ello que las protecciones paralelo se colocan en las tres combinaciones posibles (positivo-negativo, positivo-tierra y negativo-tierra) en la primer etapa, logrando una protección simétrica.
Una posible estrategia de diseño sería realizar una sola etapa de absorción y reducción como la descripta anteriormente, asegurando que la salida cumpla los requerimientos. Aunque con este diseño se lograría un volumen reducido, colocar solo una etapa produciría un estrés energético muy elevado en los componentes. A su vez, los componentes incrementarían su costo considerablemente para que el circuito pueda cumplir los requerimientos de vida útil. Por este motivo, es preferible diseñar la reducción con diferentes etapas conectadas en cascada. Con esta configuración, existe un catálogo más amplio de componentes con variedad de precios, otorgando más flexibilidad a los grados de libertad del diseño. Mediante distintas simulaciones y análisis de los componentes disponibles en el mercado, se llegó a la conclusión de que la utilización de tres etapas en cascada es la mejor relación costo/beneficio para los requerimientos particulares de esta protección.
El esquema final utilizado se presenta en la figura 3. Debido a que el equipo a proteger no posee una conexión a tierra, únicamente la primera etapa incluye una protección contra posibles descargas en tierra. Cada una de las etapas tendrá valores de tensión de entrada y cantidad inferiores de energía a absorber debido al accionar de las etapas que la preceden. Teniendo en cuenta los requerimientos de modularidad, se determina que las tres etapas se encuentren separadas físicamente en dos placas distintas, siendo las primeras dos etapas la parte consumible del circuito. La última etapa será la encargada de realizar el ajuste fino de tensión de salida, y será diseñada para que su vida útil sea infinita de acuerdo al punto de operación de los diferentes elementos que la componen. 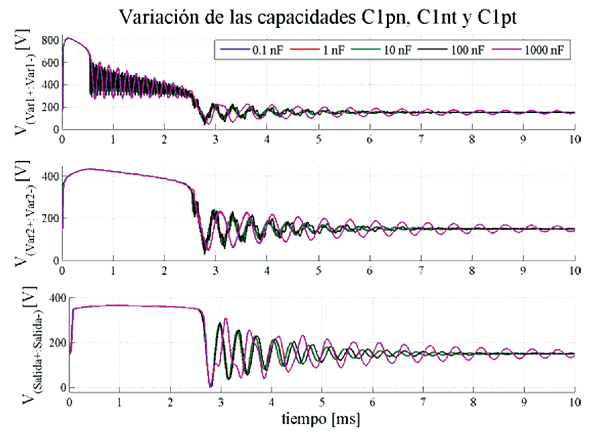 Figura 6. Tensión en los capacitores de las tres etapas. La tensión pico no varía frente a cambios en la capacidad Figura 6. Tensión en los capacitores de las tres etapas. La tensión pico no varía frente a cambios en la capacidad
Cálculo de componentes
El proceso de cálculo matemático de los valores de los componentes se aleja del objetivo del presente trabajo dado que el circuito debe ser representado por un sistema de ecuaciones diferenciales acopladas de varios órdenes de magnitud, en el cual cada una de las etapas carga a la siguiente, y existen componentes que presentan comportamientos no lineales, como los varistores y los descargadores gaseosos. Además, en el proceso de diseño influyen otros factores, como requerimientos de costos y volumen del circuito. Es por ello que para cada componente se realiza un proceso iterativo para minimizar una función de peso como la de la siguiente ecuación:
c = min (k1C + k2E + k3V + k4PO + k5τ + k6TR + ...)
siendo ‘ki’ parámetros de ajuste para cada una de las variables ‘Qi’ que sea de interés minimizar en el diseño del componente, como el costo (‘C’), la escasez en el mercado (‘E’), las dimensiones físicas (‘V’), el porcentaje de overshoot que presentará en el sistema (‘PO’), el retardo en la respuesta (‘τ’) y el tiempo estimado de recambio (‘TR’), entre otros.
Este proceso se realiza mediante diversas simulaciones en un entorno Spice, analizando los valores elegidos para los componentes y la sensibilidad del circuito en los parámetros más importantes: tensión máxima a la salida, tiempo de respuesta, energía manejada por cada componente, valores de tensión intermedios y vida útil de cada componente. La elección de un determinado componente no se podrá hacer de manera aislada, sino que el diseño deberá realizarse de manera iterativa y global, eligiendo todos los componentes a la par. 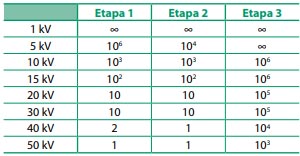 Tabla 1. Cantidad de veces que soporta cada etapa del circuito una descarga de determinada tensión pico Tabla 1. Cantidad de veces que soporta cada etapa del circuito una descarga de determinada tensión pico
Simulación del circuito de protección
Se procede a realizar la simulación del circuito para poder completar el proceso de diseño de los componentes de la topología de la figura 3 y validar su funcionamiento. Como se observa en la figura 4, las condiciones especiales de funcionamiento de este equipo requieren un modelado simplificado de los parámetros distribuidos de los cables de entrada para poder reproducir de manera más fiel las condiciones a las que el equipo se va a enfrentar una vez instalado en campo. Por otro lado, la descarga atmosférica es simulada durante el peor caso de funcionamiento nominal. Es decir, se simula la tensión máxima de trabajo a la entrada (150 volts) con una carga a la salida equivalente a la impedancia de entrada del circuito que se quiere proteger.
El circuito fue diseñado teniendo en cuenta todos los posibles casos de descarga atmosférica entre pares de terminales de entrada y polaridad pero, por simplicidad, durante este trabajo analizaremos y mostraremos resultados únicamente del caso presentado en la figura 4 ya que es el que posee mayor probabilidad de ocurrencia.
En la figura 2 se puede observar la simulación de la tensión resultante de una descarga atmosférica típica. La descarga utilizada como input del diseño presenta un periodo de 120 microsegundos, con un rise time de diez microsegundos y un fall time de cien microsegundos. La amplitud de tensión será variada entre uno y cincuenta kilovolts para poder determinar la vida útil de la placa ante diferentes eventos atmosféricos. La salida del circuito de protección estará conectada a una entrada de alta impedancia, cuya tensión máxima de trabajo es de 150 volts y su tensión máxima admisible es de cuatrocientos volts, por lo que ante cualquier evento atmosférico la salida de la protección nunca tiene que alcanzar o sobrepasar este valor. 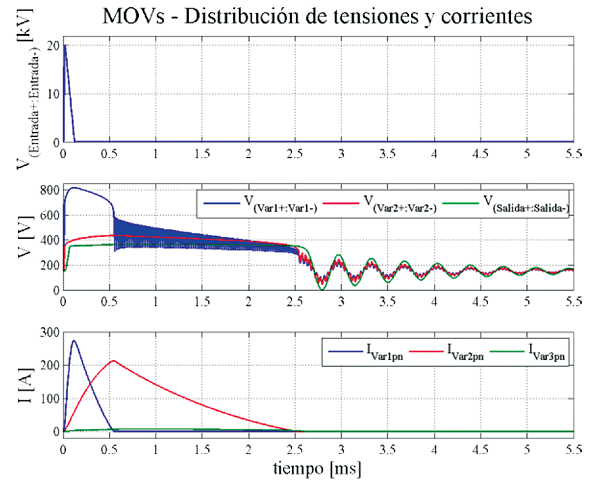 Figura 7. Distribución de tensiones y corrientes en los varistores de las tres etapas frente a una descarga atmosférica Figura 7. Distribución de tensiones y corrientes en los varistores de las tres etapas frente a una descarga atmosférica
Pasabajos LC
Las inductancias son componentes que deben responder a grandes flancos de tensión y corriente. Por lo tanto se deberá buscar elementos con buena respuesta en frecuencia, como por ejemplo núcleos de ferrita. Como se puede observar en la figura 5, el valor de inductancia (y su valor de resistencia serie parásita) resulta crítico en la respuesta del sistema.
La impedancia que presenta el inductor es directamente proporcional al valor de inductancia y a la frecuencia de la señal. Con bajos valores de inductancia la corriente pico será mayor, al igual que el valor de tensión pico en los bornes del varistor y el capacitor. Como consecuencia, si el modelo de varistor no es modificado, el varistor reducirá su vida útil ya que será expuesto a mayores niveles de tensión y corriente; o el varistor deberá ser rediseñado para mayores tensiones y corrientes máximas, incrementando su valor. Situación similar presenta el capacitor. Por el contrario, incrementar la inductancia disminuye la corriente que circula por el inductor y los valores de tensión. La desventaja directa sobre el inductor será un mayor volumen y costo en comparación con una inductancia menor (si ambas se encuentran caracterizadas para la misma corriente máxima). Como consecuencia, el estrés sobre el varistor y el capacitor serán menos prohibitivos, permitiendo un diseño más laxo y económico en estos componentes.
Se observa en las simulaciones que el valor medio de la tensión durante la resonancia del LC (cuando el varistor se desactiva y deja de conducir corriente) no presenta una gran sensibilidad con el valor de inductancia. Analizando las tres etapas en conjunto y los niveles de tensión en cada uno de los nodos intermedios (tensiones en varistores y capacitores), se determinaron los siguientes valores de inductores: 1) L1+ = L1- = 1,5 mH; 2) L2+ = L2- = 0,33 mH; 3) L3+ = L3- = 1,5 mH.
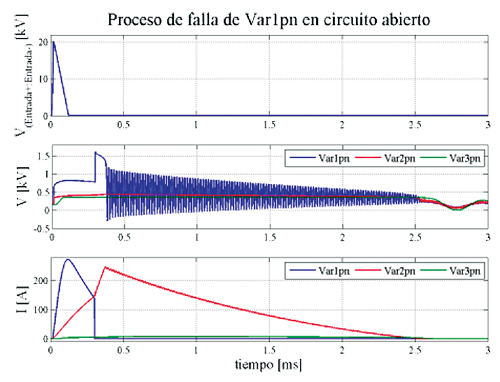 Figura 8. Vida útil de las etapas del circuito de protección en función de la tensión de la descarga atmosférica Se observa en las simulaciones (figura 6) que, habiendo definido un modelo de inductor y varistor, la tensión pico en los bornes del capacitor y del varistor prácticamente no tiene variación frente a cambios en los valores de capacidad (incluso variando el valor de capacidad a lo largo de cinco décadas en el rango de los nano- y microfaradios). El parámetro dependiente de la capacidad será la frecuencia de corte del filtro pasabajos, y la pendiente de crecimiento de los valores de tensión. Por lo tanto, conociendo el valor de tensión pico y capacidad deseada, resta determinar la tecnología de capacitores. Para las primeras dos etapas, son determinantes los valores de inductancia serie y corriente pico máxima, por lo que se debe optar por capacitores cerámicos (mica) tipo KVX, que tienen una muy baja impedancia de conexión. En la tercera etapa, debido al alto valor de capacidad, se deben utilizar capacitores de poliéster de alta frecuencia. Se determinaron los siguientes valores de capacitores: 1) C1pn = C1nt = C1pt = 10000 pF 1 kV cerámica; 2) C2pn = 10.000 pF 1 kV cerámica; 3) C3pn = 0,47 uF 450 V poliéster. Figura 8. Vida útil de las etapas del circuito de protección en función de la tensión de la descarga atmosférica Se observa en las simulaciones (figura 6) que, habiendo definido un modelo de inductor y varistor, la tensión pico en los bornes del capacitor y del varistor prácticamente no tiene variación frente a cambios en los valores de capacidad (incluso variando el valor de capacidad a lo largo de cinco décadas en el rango de los nano- y microfaradios). El parámetro dependiente de la capacidad será la frecuencia de corte del filtro pasabajos, y la pendiente de crecimiento de los valores de tensión. Por lo tanto, conociendo el valor de tensión pico y capacidad deseada, resta determinar la tecnología de capacitores. Para las primeras dos etapas, son determinantes los valores de inductancia serie y corriente pico máxima, por lo que se debe optar por capacitores cerámicos (mica) tipo KVX, que tienen una muy baja impedancia de conexión. En la tercera etapa, debido al alto valor de capacidad, se deben utilizar capacitores de poliéster de alta frecuencia. Se determinaron los siguientes valores de capacitores: 1) C1pn = C1nt = C1pt = 10000 pF 1 kV cerámica; 2) C2pn = 10.000 pF 1 kV cerámica; 3) C3pn = 0,47 uF 450 V poliéster.
De acuerdo a lo explicado en la sección “Descargador gaseoso”, en caso de falla del varistor, la tensión en el capacitor puede ser mucho mayor que la tensión pico mencionada en este apartado. Para evitar una mayor propagación de fallas y comportamientos impredecibles del circuito, la tensión de los capacitores (un kilovolt) es elegida en base a la máxima tensión que podría llegar a ocurrir en los bornes de los capacitores (la tensión de activación elegida para los GDT).
Varistor
Se encontró que la mejor relación costo/beneficio para la rápida absorción de grandes cantidades de energía en un varistor que deba ser utilizado en un circuito impreso es utilizar varistores de óxido metálico (MOV, por sus siglas en inglés). El proceso de elección requiere definir el diámetro de los varistores a utilizar, como así también su tensión de activación. La corriente máxima que puede conducir el varistor y la potencia máxima que puede disipar son funciones del diámetro del MOV. Se requiere que los varistores de las tres etapas sean de veinte milímetros de diámetro (serie S20K), que es el mayor diámetro disponible para este tipo de aplicaciones. La elección de la tensión de activación está directamente relacionada con el proceso de selección del inductor de la etapa, la vida útil del varistor ante una descarga modelo, y de cómo se quiere realizar la distribución porcentual de la energía de la descarga entre las distintas etapas. Aumentar la tensión de activación del varistor de una etapa provocará que esa etapa absorba menos energía, aumentando de esta manera la vida útil del varistor. No obstante, la energía no absorbida por ese varistor fluye a las etapas siguientes, poniendo más estrés en ellas.
La vida útil de cada una de las etapas depende principalmente de la vida útil del varistor de la etapa, y no es independiente de la vida útil de las demás etapas, ya que depende de cómo se realice la distribución de la energía de la descarga entre las diferentes etapas. Como se mencionó previamente, la tercera etapa debe ser diseñada para que su vida útil sea infinita, por lo que esta restricción obliga a que la mayor parte de la energía de la descarga sea absorbida en las primeras dos etapas. Por lo tanto, es deseable que las primeras dos etapas presenten una vida útil similar y no mejorar una etapa en detrimento de la otra, ya que cuando falle el circuito, fallará debido a la etapa que presente una menor vida útil. La vida útil del varistor se puede calcular utilizando las curvas paramétricas de las hojas de datos. Mediante la simulación de una descarga modelo, se puede obtener la corriente máxima que circulará por el varistor y el tiempo durante el cual circula dicha corriente. En base a estos dos parámetros es posible determinar la cantidad de descargas similares que puede soportar el componente antes de fallar.
En caso de falla, el MOV falla en la mayoría de los casos como un corto circuito, activando los fusibles de la placa de protección. Si por algún motivo el MOV falla como circuito abierto, la descarga atmosférica provocará un aumento desmedido de la tensión en esta etapa, activando el descargador gaseoso que a su vez activará los fusibles.
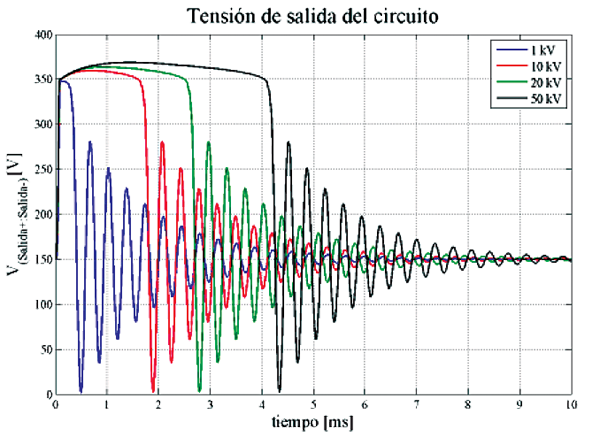 Figura 9. Simulación de la falla de un varistor en modo circuito abierto para diseñar la tensión de activación del GDT En la figura 7 se puede observar la descarga atmosférica, las tensiones en los varistores de las tres etapas (entre terminales positivo y negativo) y las corrientes de los varistores. Se distingue con claridad cómo fluye la energía a través de las etapas, disminuyendo la tensión y la corriente en cada uno de los varistores. En la tercera etapa, el varistor casi no conduce corriente en comparación con las otras dos, pero conduce la corriente suficiente para mantener la tensión dentro de los requerimientos establecidos. Cuando el varistor de la etapa uno deja de conducir corriente, la tensión en sus bornes queda liberada y comienza a oscilar debido al circuito LC de la etapa. Cuando el varistor de la segunda etapa deja de conducir, los circuitos LC acoplados de las primeras dos etapas comienzan a oscilar con la misma frecuencia. La primera etapa es la que mayor tensión y corriente tendrá a su entrada, por lo que su varistor deberá tener la mayor tensión de activación. Se determinaron los siguientes valores de varistores: 1) Var1pn = Var1nt = Var1pt = S20K320; 2) Var2pn = S20K175; 3) Var3pn = S20K175. Figura 9. Simulación de la falla de un varistor en modo circuito abierto para diseñar la tensión de activación del GDT En la figura 7 se puede observar la descarga atmosférica, las tensiones en los varistores de las tres etapas (entre terminales positivo y negativo) y las corrientes de los varistores. Se distingue con claridad cómo fluye la energía a través de las etapas, disminuyendo la tensión y la corriente en cada uno de los varistores. En la tercera etapa, el varistor casi no conduce corriente en comparación con las otras dos, pero conduce la corriente suficiente para mantener la tensión dentro de los requerimientos establecidos. Cuando el varistor de la etapa uno deja de conducir corriente, la tensión en sus bornes queda liberada y comienza a oscilar debido al circuito LC de la etapa. Cuando el varistor de la segunda etapa deja de conducir, los circuitos LC acoplados de las primeras dos etapas comienzan a oscilar con la misma frecuencia. La primera etapa es la que mayor tensión y corriente tendrá a su entrada, por lo que su varistor deberá tener la mayor tensión de activación. Se determinaron los siguientes valores de varistores: 1) Var1pn = Var1nt = Var1pt = S20K320; 2) Var2pn = S20K175; 3) Var3pn = S20K175.
Estimación de la vida útil
Luego de determinar los principales componentes del circuito, se procede a estimar cuántas descargas atmosféricas de distintas magnitudes puede soportar cada una de las etapas. Los resultados se incluyen en la tabla 1 y en la figura 8.
Descargador gaseoso (GDT)
El descargador gaseoso es el último recurso de protección en caso de que todo lo demás falle. Si el circuito cumple su vida útil y alguno de los varistores presenta un modo de falla con circuito abierto en lugar de cortocircuito, el descargador gaseoso debe activarse para activar a su vez los fusibles de la protección. Si en este escenario el descargador no se encontrara instalado, la tensión en los terminales del varistor de la etapa subiría considerablemente, conduciendo toda la energía a la próxima etapa, produciendo de esta manera un fallo en cascada de las etapas y posiblemente del equipo que se está protegiendo.
Figura 10. Tensión de salida del circuito en función de la tensión pico de la descarga atmosférica En la figura 9, se puede observar la simulación de un modo de falla circuito abierto del varistor Var1pn de la etapa uno durante una descarga atmosférica. La falla ocurre a los 0,3 milisegundos de comenzada la simulación, momento en el cual la tensión del nodo queda liberada, elevándose considerablemente y luego oscilando debido al circuito LC. Las tensiones en los varistores de las etapas dos y tres no se ven afectadas, pero se observa un incremento considerable de la corriente del varistor de la etapa dos (tanto en amplitud como en duración) ya que este debe absorber la energía que no está absorbiendo la etapa uno a causa de la falla. Cabe destacar que incluso en esta situación de falla crítica la corriente del varistor de la etapa tres no se ve afectada, por lo que la tercer etapa sigue teniendo una vida útil infinita. Sin embargo, no es deseable que la protección siga en funcionamiento cuando una de las etapas ha quedado fuera de servicio, ya que una muy probable falla puede ocurrir en la etapa restante, trasladando toda la energía hasta la etapa tres y el equipo, produciendo fallas en ambos. Por lo tanto, los GDT son diseñados para actuar cuando una de las etapas ha fallado. Para ello, la tensión de activación se elige en base a un valor de tensión que solo se puede alcanzar en modo de falla, como por ejemplo un kilovolt para el caso de la figura 9. Estos componentes poseen una alta velocidad de respuesta (en el orden de las decenas de nanosegundos) y una alta capacidad de transporte de corriente (dos kiloamperes para el componente elegido). Se determinaron los siguientes valores de descargadores gaseosos: 1) GDT1pn = GDT1nt = GDT1pt = 1kV; 2) GDT2pn = 1kV.
Tensión de salida
El valor máximo de la tensión de salida del circuito no se ve afectado por la amplitud de la descarga en la entrada (figura 10). El circuito cumple los requerimientos de tensión en los bornes de salida para los distintos valores de amplitudes que puede presentar una descarga, regresando a los valores nominales una vez que la descarga ha sido absorbida.
Fusible
La elección del fusible se realiza mediante el cálculo del parámetro I2t. Teniendo el resto del circuito definido, se simula cuál será la corriente máxima pico a la entrada del circuito ante el peor caso de descarga atmosférica y el tiempo de duración. Con estos dos valores se puede obtener el parámetro I2t y elegir el fusible con el valor del parámetro inmediatamente superior.
En el proceso de selección también influye el valor de tensión nominal del circuito (cuando no se encuentra afectado por una descarga), ya que el fusible tiene que permanecer desactivado en este estado. Se determinaron los siguientes valores para los fusibles: 1) F1+ = F1- = Fuse Cerm 5A 250 Vca 150 Vcc 5 x 20. 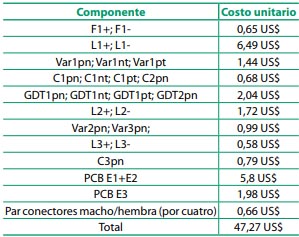 Tabla 2. Detalle del costo de los componentes del circuito Tabla 2. Detalle del costo de los componentes del circuito
Construcción del prototipo
La construcción del circuito requiere ubicar a los componentes a modo de minimizar las inductancias y resistencias de conexión y reducir las capacidades parásitas entre componentes y cables.
Análisis del costo
En la tabla 2 se encuentra prorrateado el costo del circuito entre los diferentes componentes.
El costo total unitario de los componentes del circuito asciende a 47,27 dólares, y se reduce considerablemente si se implementa una economía de escala (por ejemplo, si se fabrica un lote de cien unidades, el costo unitario se reduce en un cuarenta por ciento). El mayor costo (y volumen) proviene de los inductores de la primera etapa, representando alrededor del 28 por ciento del costo total. Ello se debe a sus requerimientos elevados en valores de inductancia y corriente, lo que se traduce en una mayor cantidad de cable y su diámetro. Es por ello que en este componente en particular se invirtió el mayor tiempo en realizar simulaciones y optimizaciones de sus parámetros. La placa consumible (etapas uno y dos) tiene un costo aproximado de 41,03 dólares, mientras que la placa de la etapa tres es la menos costosa debido a sus bajos requerimientos, con un costo de 6,24 dólares. 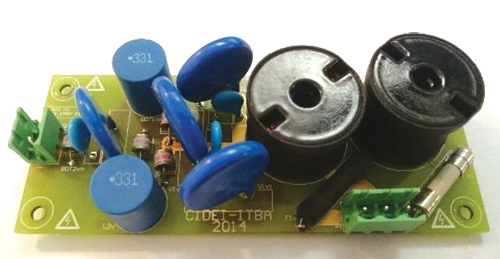 Figura 11. Circuito impreso con las dos primeras etapas Figura 11. Circuito impreso con las dos primeras etapas
Circuito impreso
En las figuras 11 y 12, se pueden observar los diseños de los circuitos impresos para las placas de protección. La etapa 3 se encuentra separada de las primeras dos, integrada en un circuito impreso que realiza otras funciones dentro del equipo, mientras que las primeras dos etapas se encuentran en una placa separada de manera modular.
Especial cuidado se tuvo al momento de realizar la distribución de componentes, manteniendo una distancia prudencial entre las pistas de las distintas señales para evitar una potencial ionización del aire y un arco eléctrico entre pistas ante una descarga atmosférica. A la vez, se intentó minimizar las dimensiones de la placa para que su instalación pueda realizarse sin modificar otras variables de diseño integrales del equipo a proteger como, por ejemplo, las dimensiones físicas del gabinete. En la figura 13 se observa el circuito impreso ya construido e instalado en campo. 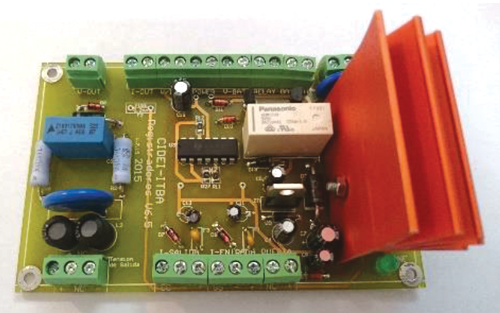 Figura 12. Circuito impreso con las tres etapas Figura 12. Circuito impreso con las tres etapas
Conclusiones
En este trabajo se presenta la falla catastrófica que sufren los equipos electrónicos instalados en campo cuyas mediciones se encuentran referenciadas a tierra, debido a descargas atmosféricas, demostrando que una protección paralela convencional a tierra no es suficiente. La protección debe proteger al equipo de las descargas atmosféricas de alta energía logrando en simultáneo que las señales a medir no sean alteradas.
Debido a la complejidad de las matemáticas involucradas y las alinealidades de los componentes hacen compleja una resolución teórica del sistema, por lo tanto la única herramienta disponible para solucionar esta problemática es una combinación de herramientas de simulación, un análisis exhaustivo de las fallas y los componentes involucrados, los cuales permitieron diseñar, implementar y probar satisfactoriamente una solución para la aplicación.
En este trabajo se demuestra mediante simulaciones y la construcción de un prototipo que es posible construir un circuito que evite que las descargas atmosféricas dañen los equipos electrónicos instalados en campo, cumpliendo con todos los requerimientos de diseño exigidos.
Se ha descrito el diseño de un circuito que permite detener infinitas descargas del orden de un kilovolt, cien descargas del orden de diez kilovolts o una descarga del orden de los cincuenta kilovolts, aumentando el tiempo medio entre fallas de los equipos electrónicos instalados en campo y, por lo tanto, aumentando su vida útil así como minimizando las tareas de mantenimiento.  Figura 13. Circuito impreso instalado en campo Figura 13. Circuito impreso instalado en campo
Referencias
-
Glushakow, B., Neri, D. (2004) A call to standardize the waveforms used to test SPDs. ICLP, Avignon.
-
Krein, Philip T. (1998). Elements Of Power Electronics. Oxford. New York.
-
Littlefuse Inc., The ABCs of MOVs. AN9311.6 (1999).
-
Littlefuse Inc., Fuseology Selection Guide. Fuse Characteristics, Terms and Consideration Factors (2014).
-
Littlefuse Inc., Gas Discharge Tubes CG/CG2 Series (2015).
-
Micheloud, O., Aguirre, M. and Nemirosvky N. (2008). Proteccion catodica sin fallas catastroficas por descargas atmosfericas. AADECA. Buenos Aires.
-
Neri, D. (1997), “Surge Protection: Where and How Much?” en EC&M Electrical Construction & Maintenance. MCG
-
Electronics. New York.
-
Peabody, A.W. (2001). Peabody’s Control of Pipeline Corrosion. Second Edition, R.L. Bianchetti - Nace Press.
-
Schneider Electric, “LV surges and surge arresters. LV insulation co-ordination”. (1999). en Cahier technique n.° 179. Francia.
-
Waggoner, R (1993). “Lightning strikes and travelling waves” en EC&M Electrical Construction & Maintenance. MCG Electronics. New York.
Agradecimientos A YPF, por su apoyo tanto técnico como económico, en especial a Federico Ernst, Jorge Ronchetti y Juan Manuel Pardo.
Nota del editor. La nota aquí publicada fue originalmente presentada por los autores como artículo técnico en AADECA 2016, Semana del Control Automático - 25° Congreso Argentino de Control Automático, celebrado en la ciudad de Buenos Aires entre el 1 y el 3 de noviembre de 2016. |


