
La potencia reactiva del motor de inducción es esencialmente constante. Esta característica lo convierte en una aplicación interesante de los capacitores para la compensación del factor de potencia.
Base teórica
El factor de potencia de un motor de inducción a plena carga es alto, generalmente entre un 80 a 90%, dependiendo de la velocidad y del tipo de motor. Sin embargo, con cargas pequeñas, el factor de potencia disminuye rápidamente, como se ilustra en la figura 1. Generalmente los motores de inducción no trabajan a plena carga, lo que resulta en un factor de potencia bajo durante la operación.
Aunque el factor de potencia de un motor de inducción varía con la carga, se puede observar en la figura 1 que la potencia reactiva del motor es esencialmente constante. Esta característica convierte al motor de inducción en una aplicación interesante de los capacitores para la compensación del factor de potencia, ya que compensando el motor con un capacitor adecuado, el factor de potencia asciende hasta el 95 a 98% con plena carga, y aún más con cargas parciales. El capacitor instalado en el caso de la figura 1 como ejemplo es de 5 kVar, que corresponde a los requerimientos magnetizantes del motor en vacío.
La conexión de capacitores para el mejoramiento del factor de potencia no modifica las características de funcionamiento del motor, ya que la velocidad de operación y la potencia mecánica solo dependen de la carga del motor y de la tensión aplicada.
En general, el factor de potencia del motor disminuye cuando aumenta la tensión nominal, y aumenta cuando esta disminuye, de allí que sea importante mantener la tensión de la planta en niveles razonables, con la ventaja adicional de menores pérdidas en el hierro porque son proporcionales a la tensión al cuadrado.
Aunque el factor de potencia de un motor de inducción varía con la carga, se puede observar en la figura 1 que la potencia reactiva del motor es esencialmente constante. Esta característica convierte al motor de inducción en una aplicación interesante de los capacitores para la compensación del factor de potencia, ya que compensando el motor con un capacitor adecuado, el factor de potencia asciende hasta el 95 a 98% con plena carga, y aún más con cargas parciales. El capacitor instalado en el caso de la figura 1 como ejemplo es de 5 kVar, que corresponde a los requerimientos magnetizantes del motor en vacío.
La conexión de capacitores para el mejoramiento del factor de potencia no modifica las características de funcionamiento del motor, ya que la velocidad de operación y la potencia mecánica solo dependen de la carga del motor y de la tensión aplicada.
En general, el factor de potencia del motor disminuye cuando aumenta la tensión nominal, y aumenta cuando esta disminuye, de allí que sea importante mantener la tensión de la planta en niveles razonables, con la ventaja adicional de menores pérdidas en el hierro porque son proporcionales a la tensión al cuadrado.
El factor de potencia del motor disminuye cuando aumenta la tensión nominal, y aumenta cuando esta disminuye
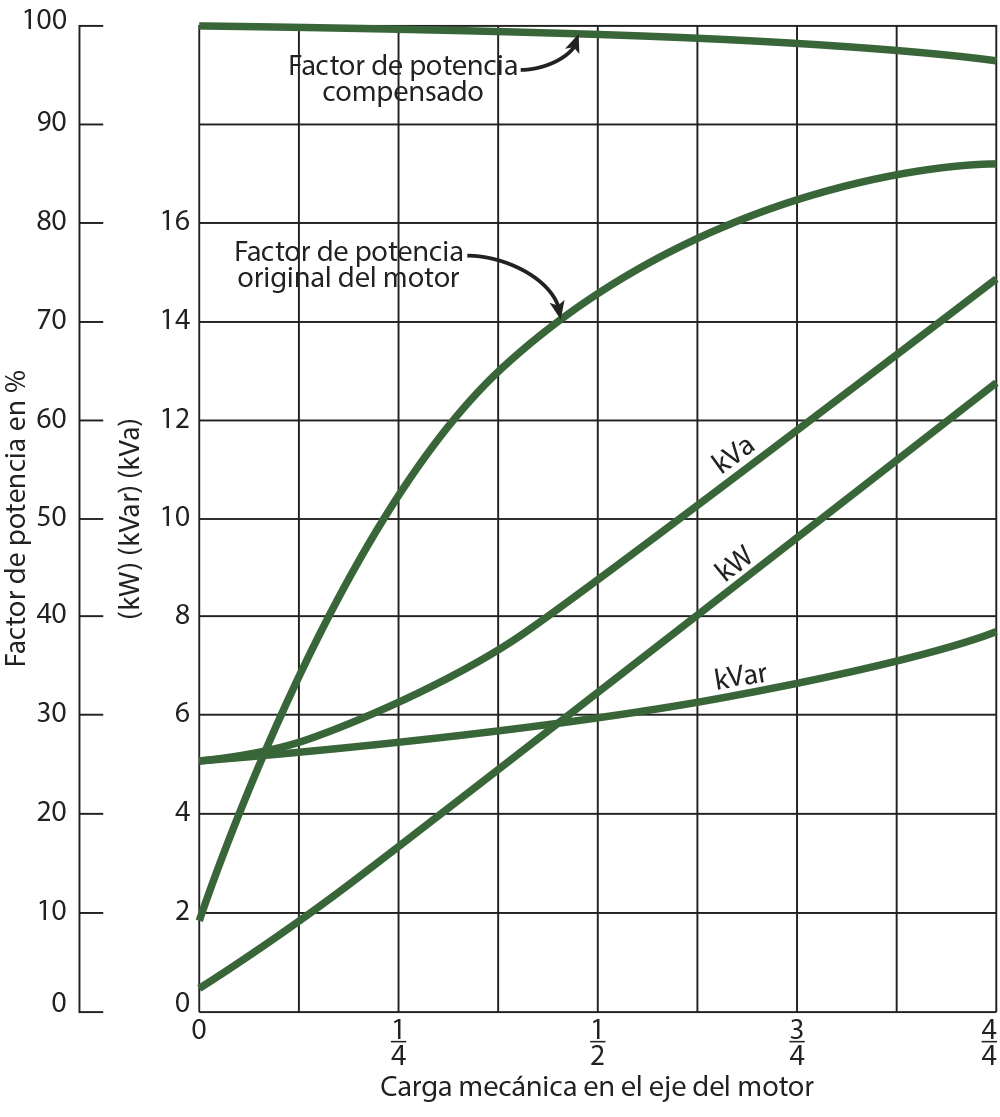 Figura 1. Con cargas pequeñas, el factor de potencia de un motor de inducción disminuye rápidamente.
Figura 1. Con cargas pequeñas, el factor de potencia de un motor de inducción disminuye rápidamente.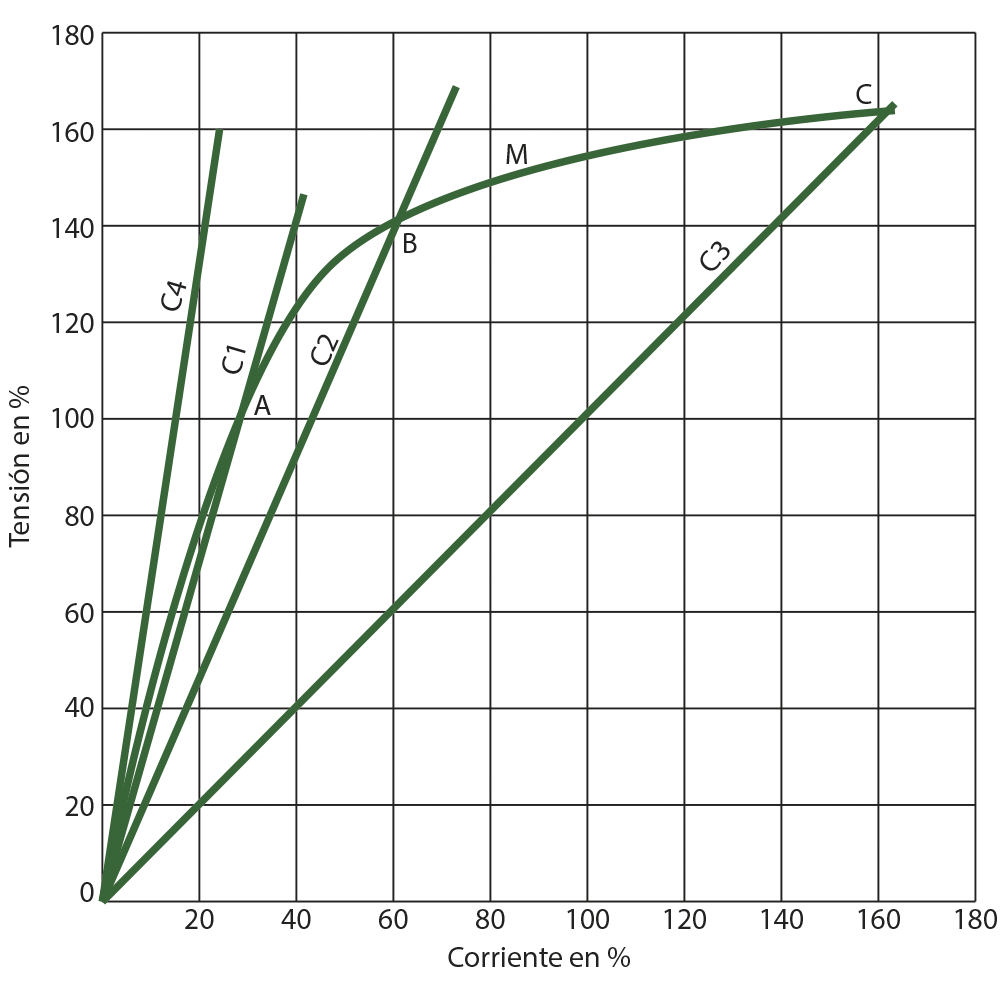 Figura 2. Curva de magnetización típica de un motor asincrónico y distintas rectas correspondientes a diferentes capacitores que se conectan en paralelo.
Figura 2. Curva de magnetización típica de un motor asincrónico y distintas rectas correspondientes a diferentes capacitores que se conectan en paralelo.
Sobretensiones debidas a autoexcitación
Un capacitor puede proveer parte o toda la corriente magnetizante requerida por el motor. Por lo tanto, cuando el contactor del motor es abierto y el motor se desconecta de la red, el capacitor suministra la corriente magnetizante del motor y este se "autoexcita", actuando como un generador de tensión. La magnitud del voltaje generado dependerá del valor del capacitor y de la velocidad del motor.
En la figura 2 se observa una curva de magnetización (“M”) típica de un motor asincrónico y distintas rectas correspondientes a diferentes capacitores que se conectan en paralelo (recordar que “I = ω.C.U”, por lo tanto “I = f[U]” es una recta cuya pendiente depende de “C”).
Cuando el motor está en vacío, la corriente magnetizante a tensión nominal es, aproximadamente, del 27%, y el capacitor que se conecta para compensar el 100% de la potencia reactiva vale “C1” (capacidad límite). En este caso, no hay sobretensión cuando se abre el interruptor.
Si se conecta un capacitor C2 tal que, a plena carga, el factor de potencia sea uno, cuando se abra el contactor aparecerá una sobretensión de más del 40% sobre la nominal. Para mayores capacidades, como C3, que entrega la corriente nominal del motor, la sobretensión será aún mayor (64%).
En la figura 2 se observa una curva de magnetización (“M”) típica de un motor asincrónico y distintas rectas correspondientes a diferentes capacitores que se conectan en paralelo (recordar que “I = ω.C.U”, por lo tanto “I = f[U]” es una recta cuya pendiente depende de “C”).
Cuando el motor está en vacío, la corriente magnetizante a tensión nominal es, aproximadamente, del 27%, y el capacitor que se conecta para compensar el 100% de la potencia reactiva vale “C1” (capacidad límite). En este caso, no hay sobretensión cuando se abre el interruptor.
Si se conecta un capacitor C2 tal que, a plena carga, el factor de potencia sea uno, cuando se abra el contactor aparecerá una sobretensión de más del 40% sobre la nominal. Para mayores capacidades, como C3, que entrega la corriente nominal del motor, la sobretensión será aún mayor (64%).
Un capacitor puede proveer parte o toda la corriente magnetizante requerida por el motor.
Como contrapartida, si se conecta un capacitor C4, menor que C1, no hay ningún peligro de sobretensión, pero esto debe hacerse de manera tal que la capacidad que se conecte sea lo más próxima posible a la capacidad límite (C1).
Una regla general que puede aplicarse es que para motores de hasta 10 kW, la potencia capacitiva debe ser del 70 al 75% de la potencia inductiva absorbida en vacío, y para potencias mayores, dicho valor es del 80 al 85%. Si se dispone de la característica de vacío del motor, se puede compensar con valores del 90% o mayores si se conoce la tolerancia de esta curva y la tolerancia del capacitor.
En la práctica, la velocidad del motor decrece rápidamente luego de que se desconecta de la red, por lo tanto el voltaje decrece rápidamente. Un 15 a 20% de reducción en la velocidad elimina suficientemente la autoexcitación para que el voltaje colapse en unos pocos segundos. De todas maneras, en unos pocos casos donde las cargas presentan una gran inercia, el voltaje de autoexcitación se puede mantener durante algunos minutos.
Una regla general que puede aplicarse es que para motores de hasta 10 kW, la potencia capacitiva debe ser del 70 al 75% de la potencia inductiva absorbida en vacío, y para potencias mayores, dicho valor es del 80 al 85%. Si se dispone de la característica de vacío del motor, se puede compensar con valores del 90% o mayores si se conoce la tolerancia de esta curva y la tolerancia del capacitor.
En la práctica, la velocidad del motor decrece rápidamente luego de que se desconecta de la red, por lo tanto el voltaje decrece rápidamente. Un 15 a 20% de reducción en la velocidad elimina suficientemente la autoexcitación para que el voltaje colapse en unos pocos segundos. De todas maneras, en unos pocos casos donde las cargas presentan una gran inercia, el voltaje de autoexcitación se puede mantener durante algunos minutos.
Ejemplo práctico
En caso de un motor trifásico con valores nominales como los siguientes:
- Pm = 30 kW
- Unm = 3 x 380 V
- Inm = 56 A
la corriente de vacío aproximada del motor será “Iom = 0,27 . Inm = 15 A”. Sabiendo que “0,9 . Iom = 13,5 A”, a fin de evitar la sobreexcitación, la corriente del capacitor debe ser menor a “0,9 . Iom”. Si se selecciona un capacitor de “Qc = 5 kVAr” con un valor de corriente de 7,6 A, entonces se cumple que 7,6 A es menor a 13,5 A y, por lo tanto, no habrá autoexcitación.
Para motores de hasta 10 kW, la potencia capacitiva debe ser del 70 al 75% de la potencia inductiva absorbida en vacío.

Por Ing. Gustavo Firme, de Leyden
Todas las publicaciones de:
Publicado en:
Número:
Mes:
Año: