Prof. Ing. Alberto Luis FarinaAsesor en ingeniería eléctrica y supervisión de obras |
 |
El montaje y la puesta en marcha de un motor eléctrico trifásico (MET), como el de cualquier otro equipo tecnológico, requiere de la aplicación de ciertos métodos y conocimientos, ya que hacen no solo a su funcionamiento en sí y a su vida útil, sino también a las del equipo al cual está acoplado, que, como se ha insistido en las notas anteriores, hacen al servicio que presta este conjunto. Es por esto último que se ha incorporado esta parte, en la cual se dan algunas pautas elementales, como para poder realizar un trabajo satisfactorio. 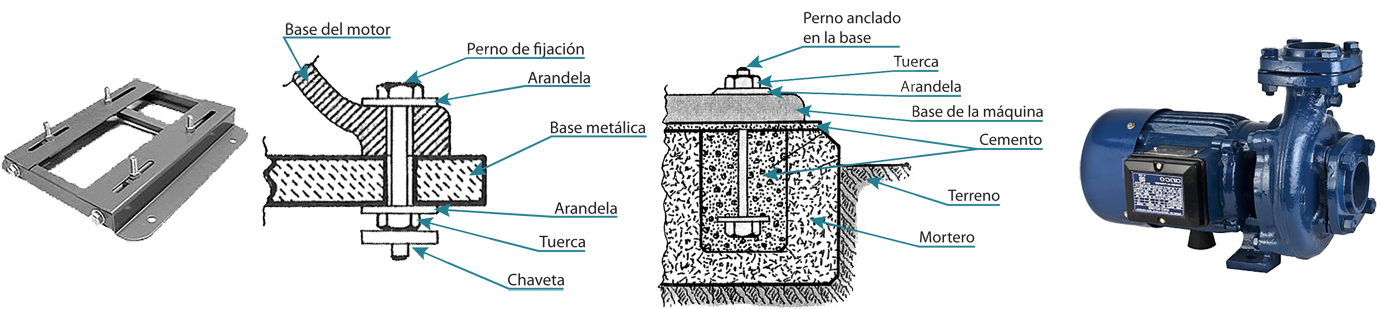 Figura 1. Bastidor o base para el montaje del MET Figura 1. Bastidor o base para el montaje del METFigura 2. Fijación a una base metálica Figura 3. Fijación a una base de hormigón Figura 4. Acoplamiento directo Introducción El concepto básico es que la forma de montar los MET es de fundamental importancia para el correcto funcionamiento y la vida útil tanto de este como del equipo acoplado, lo cual hace al servicio que el conjunto presta, como puede ser: una bomba de agua potable o la extracción de líquidos cloacales, un compresor, etc. Ubicación La ubicación física del equipo impulsado por un MET es determinada por la función del primero y del ambiente en que se hace el montaje del sistema que lo tiene incorporado, por ejemplo, un compresor de aire comprimido, una rampa, etc. Montaje mecánicoLa realización del montaje mecánico es la primera etapa de la puesta en funcionamiento de un equipo acoplado a un MET. Se pueden presentar los siguientes casos:
Acoplamiento mecánico Los MET siempre trabajan acoplados a los equipos que impulsan, aunque los estudios teóricos sobre su principio y características de funcionamiento se hagan con estos tomados sin carga.
Una pieza fundamental en todos los tipos de acoplamientos mencionados es la chaveta, la cual se aloja en el extremo del eje del MET. Acoplamiento directoEl eje del MET es común con el del equipo impulsado, y forma parte del conjunto, por ejemplo, bombas centrífugas para agua, ciertos compresores, etc. (figura 4). Acoplamiento flexibleExiste una amplia gama de estos dispositivos, diseñados y fabricados en función de la potencia mecánica que se transmitirá. Constan de dos placas de acero, para fijar al MET por un lado y al equipo que será impulsado por el otro, entre las cuales se coloca una pieza fabricada con un material elástico resistente de color negro que absorba mínimamente las desalineaciones y vibraciones. Este conjunto se fija mediante pernos y tornillos. La figura 5 muestra un esquema de este tipo de acoplamiento; la figura 6, un dispositivo de acoplamiento flexible típico, y la 7, una bomba acoplada.
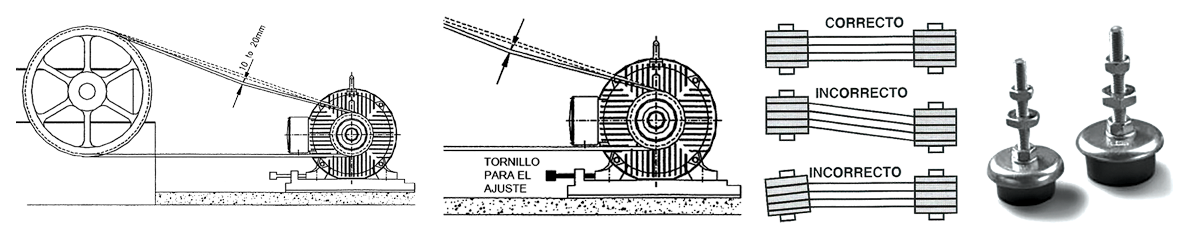
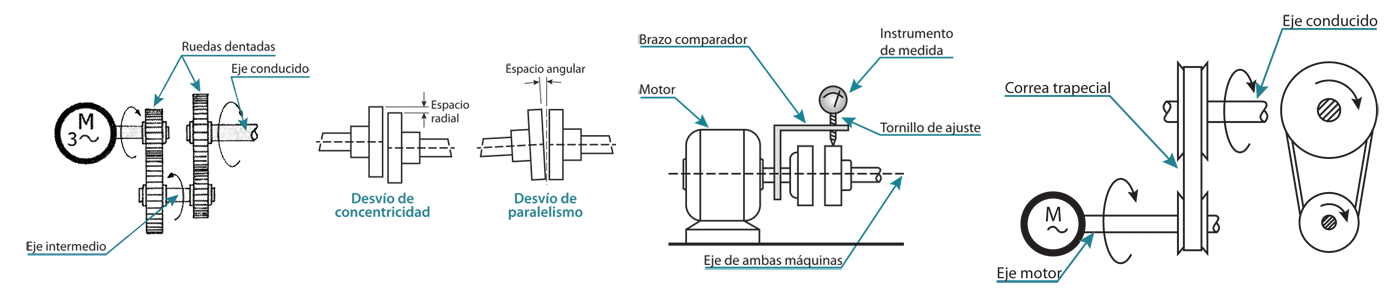
Acoplamiento rígidoFísicamente parecido al anterior, este tipo no cuenta con la pieza intermedia (figura 8). La utilización de uno u otro tipo está relacionada con las características del equipo impulsado. Acoplamiento con engranajes Se emplea internamente en ciertos tipos de equipos o bien en las denominadas cajas reductoras de ciertas máquinas (figura 9). Alineación de los acoplamientosEn los acoplamientos flexibles y rígidos es necesario mantener la linealidad entre los centros de los ejes, a los fines de obtener un correcto funcionamiento (figuras 10 y 11). Si no se logra, se producirán vibraciones y desgaste prematuro de los elementos involucrados en la rotación. Polea y correaPolea y correa es el sistema más usado cuando se trata de las potencias mecánicas medias y mayores (figura 12). Se requiere de dos poleas, una en cada eje. En general, estas tienen distintos diámetros (figura 13) y se vinculan mediante una correa del tipo en “V” o trapezoidal (figura 14). También, en ciertas aplicaciones se utilizan correas dentadas, que emplean poleas adecuadas. Lo diámetros de las poleas están determinados por la potencia que se transmitirá y la velocidad de rotación del MET y el equipo impulsado.
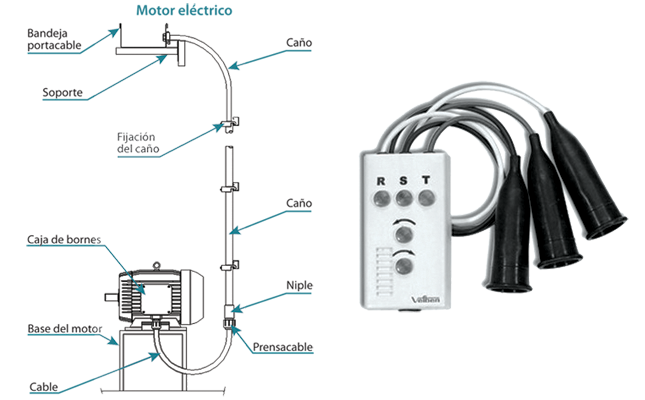
Las poleas se insertan en los ejes mediante un agujero practicado en el cubo de la polea, se fijan mediante un tornillo (figura 15), y se utiliza una chaveta, elemento metálico de forma prismática que se monta entre el eje y la polea. En la figura 15 se puede apreciar el lugar que se deja a estos efectos en la polea. AlineaciónEn los sistemas de acoplamiento que utilizan poleas y correas también es necesario mantener la linealidad entre los centros de los ejes, a los fines de obtener un correcto funcionamiento (figura 19). Si no se logra, se producirán vibraciones y desgaste prematuro de los elementos involucrados en la rotación. VibraciónLos MET en general y los equipos acoplados a ellos, irremediablemente, producen vibraciones no solo en el momento de arrancar sino también durante el funcionamiento normal, por lo cual se hace necesario utilizar los denominados “soportes antivibratorios”, los cuales pueden presentar formas como las que se muestran en la figura 20, denominadas “tacos”, o bien placas que se colocan debajo del motor y el equipo acoplado. Canalización eléctrica Los MET, al igual que otros tipos de aparatos, requieren de una alimentación con un determinado valor de tensión, la cual se llama “tensión asignada” o bien “tensión nominal”, y de una frecuencia, también asignada o nominal; ello les permitirá entregar una determinada potencia mecánica en su eje manteniendo el régimen térmico establecido en el diseño. En este caso, se trata de tres cables entre los cuales hay 380 volts, y la frecuencia de la red es de cincuenta hertzios (50 Hz). Disposiciones típicas de las canalizaciones eléctricas Las canalizaciones eléctricas pueden estar hechas con caños rígidos de acero o material plástico (con sus respectivas variantes normalizadas) o bien con bandejas portacables de diversos tipos y materiales. Se destaca que la acometida a la caja de bornes del MET debe hacerse con caño de acero flexible, a fin de absorber vibraciones y diferencias de distancias. ConexionadoVerificación previaAntes de conectar el MET al tablero eléctrico, se puede hacer una verificación de continuidad y una medición de la resistencia eléctrica de aislamiento de los bobinados.
Conexionado propiamente dichoEl cable que se empleará debe ser siempre del tipo energía, o sea, para una tensión máxima de 1,1 kilovolt (IRAM 2.178), y la conexión de cada conductor del cable al borne correspondiente de la caja de conexiones se debe hacer empleando un terminal del tipo cerrado. Estará conformado por cuatro cables (R, S, T y PE). Cable La determinación de la sección del cable se basa en el tipo de canalización que se empleará (BPC, caño tipo plástico o de acero), si está tendida a la vista o enterrada. También es imprescindible conocer la corriente de cortocircuito disponible en los bornes de salida del elemento de protección general del tablero eléctrico, y la distancia que media entre este último y el MET, y tipo de ambiente en donde se tenderá la canalización eléctrica. Sentido de giro En los MET, el sentido de giro depende de la secuencia de fases, en consecuencia, se debe conocer que exige el equipo acoplado. Según lo visto en la parte 3 de estas notas (“Motores eléctricos trifásicos: arranque estrella-triángulo e inversión del giro”, Ingeniería Eléctrica 334), esto es muy importante porque no todos los equipos pueden girar en sentido contrario al indicado por el fabricante. En la figura 24 se muestran las secuencias de fases y el sentido de giro de las diversas opciones de conexiones. Ajuste de las proteccionesUna vez conectado y verificado el correcto funcionamiento, se debe proceder a medir la corriente eléctrica consumida por el MET a plena carga, a los fines de poder regular el relé de protección por sobrecarga empleado. Puesta a tierraSe debe tener presente que la carcasa del MET, independientemente del tipo constructivo, debe estar rígidamente conectada al sistema de puesta a tierra, asegurando un contacto efectivo del metal con el terminal del conductor o cable, para lo cual, de ser necesario, se debe quitar la pintura, en caso de no traer un tornillo para tal efecto. Desde todo punto de vista es el equipo eléctrico que más necesita esta conexión. Equipo de protección personal La ejecución de algunas de las tareas descriptas hasta aquí se hace con la instalación eléctrica bajo tensión, por lo cual estas deben ser planeadas de antemano, de acuerdo a la disposición que adopta en el lugar del montaje, a los fines de evitar accidentes personales. Esto incluye necesariamente los instrumentos y los otros elementos afines que se utilizarán. Bibliografía
Para seguir ampliando conocimientos...Alberto Luis Farina es ingeniero electricista especializado en ingeniería destinada al empleo de la energía eléctrica y profesor universitario. De la mano de la Librería y Editorial Alsina, ha publicado libros sobre los temas de su especialidad:
Nota del autor. Los motores eléctricos son máquinas que están presentes en numerosas aplicaciones que van desde los ámbitos hogareño, hospitalario, de servicios, hasta los industriales, entre otros. Oportunamente, se ha publicado una serie de notas sobre los motores de tipo monofásico, y a partir de la edición de Ingeniería Eléctrica 330 (abril de 2018) se editan notas acerca de los trifásicos. La variedad constructiva de estas máquinas es muy grande, por lo cual el centro de la atención estará en aquellos que tienen aplicaciones más comunes en los ámbitos generales. Estas publicaciones se hacen con tono práctico para quienes tienen que reemplazar, instalar y mantener motores, dejando de lado las aplicaciones más complejas o particulares.
|
|
Contacto: Prof. Ing. Alberto Luis Farina |
|


 anuncio x
anuncio x