Introducción
Es bien sabido que los conductores (de energía y de guardia) de las líneas de transmisión están sometidos a vibraciones, y que la forma más común de daño producido por ellos es la fatiga de los alambres del conductor, ampliamente circunscripto en la grapa de suspensión.
Las flexiones localizadas que se producen a la salida de la grapa dependen de la rigidez del conductor, y el daño que generan dichas flexiones proviene de su carácter cíclico, que obedece a la ley de Wöhler.
A las deformaciones por tracción del cable, que varían lentamente en función de la temperatura y del tiro T, se suman deformaciones por flexión cíclica cuya repetición y magnitud dependen de las características de las vibraciones.
Antes se creía que la tensión mecánica del conductor jugaba un rol esencial en la generación de fallas por vibraciones hasta el punto tal que, durante muchos años, se recomendó seleccionar una tensión del conductor, como tensión media anual, que no fuera superior al 20% de la tensión de rotura. Esta regla parece no haber tenido mucha influencia, y ya ha dejado de aplicarse aunque sigue tomándose como referencia en los proyectos de líneas. La tensión mecánica del cable interviene porque modifica la deformación media del aluminio por la influencia que tiene sobre la frecuencia y la longitud de onda de la vibración, pero su rol no es el más importante ya que entran en juego otros parámetros tales como los siguientes:
-
La rigidez del conductor, es decir, su capacidad de ser considerado como una barra rígida sometida a flexión.
-
La forma de la grapa, sus dimensiones, su radio de curvatura y el sistema de ajuste del conductor que está dentro.
Todo esto acentúa la importancia de un adecuado diseño de grapa de suspensión, para minimizar la ocurrencia de la fatiga del conductor y su falla provocada por las tensiones dinámicas resultantes de las flexiones cíclicas que se producen en los puntos donde el movimiento está impedido.
Los parámetros de diseño de la grapa, tales como geometría del perfil interno, magnitud de la carga de compresión sobre el conductor y eventual presencia de insertos, pueden afectar tanto el rendimiento de la grapa como la concentración de tensiones del conductor.
La optimización de estos parámetros permitirá diseños más económicos de las líneas de transmisión, con el uso de conductores estándares bajo tensiones mecánicas más elevadas, con la consiguiente disminución de flechas de cables y altura de torres.
Por su importancia, CIGRE confeccionó una guía sobre el uso de las grapas de suspensión abulonadas, en la que identifica los parámetros principales de diseño que influencian la fatiga del conductor, y recomienda criterios a ser utilizados en un proyecto para optimizar el rendimiento del conjunto grapa-conductor. Dichos parámetros son geométricos, mecánicos y eléctricos.
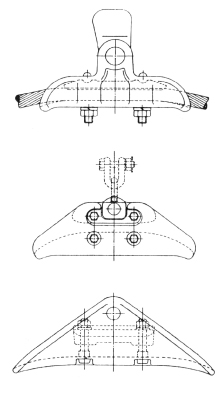
Figura 1
Análisis de los parámetros de diseño de la grapa
Analizaremos los parámetros de diseño de la grapa de suspensión, identificados como principales a la luz de los estudios y experiencias realizadas internacionalmente, junto con los criterios de la guía CIGRE .
Geometría del cuerpo y del apretador
La influencia de la geometría de la grapa de suspensión en la rotura de los alambres del conductor ha sido reconocida desde hace mucho tiempo, como así también la importancia del radio de curvatura longitudinal y la dificultad para optimizarlo. Hard establece que un diseño pobre de la grapa origina mayores deformaciones en los alambres del conductor para una amplitud de vibración dada. Más tarde, Poffenberger y Swart también se refieren a la importancia de la configuración de la grapa. Edwards y Boyd atribuyen el daño por fatiga encontrado en un conductor al diseño pobre de la grapa, debido a una excesiva curvatura longitudinal del apretador.
Otros autores han realizado experiencias con grapas de distintos radios de curvatura longitudinal del cuerpo y longitudes de apoyo del conductor. Teóricamente, los perfiles o las curvaturas longitudinales y transversales del cuerpo y del apretador debería seguir la curvatura natural del conductor y no debería reducir su resistencia mecánica. Sin embargo, este criterio teórico es imposible de satisfacer debido al amplio rango de hipótesis de carga al cual debe acomodarse. Por lo tanto, deberá conseguirse una solución de compromiso en función de las diferentes hipótesis de carga y de la longitud de contacto de la grapa.
Los distintos autores han trabajado con grapas de suspensión cuyas configuraciones típicas se muestran en la figura 1.
A continuación, resumimos los resultados de las experiencias más significativas realizadas por distintos autores.
Seppä recomienda que el último punto de contacto entre grapa y conductor no coincida con el último punto de contacto entre apretador y conductor (ver figura 2). Esto puede lograrse cuando el cuerpo de la grapa está diseñado con un contorno suave, de manera que el contacto entre conductor y grapa sea muy gradual y la grapa no forme un punto extremo empotrado.
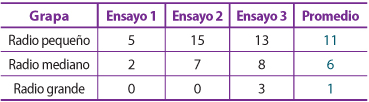
Tabla 1. Número de roturas de alambres
Ramey y Townsend llevaron a cabo experiencias usando tres grapas con distintos radios en la dirección longitudinal: pequeño, mediano y grande (ver figura 3), utilizando el conductor de aluminio acero Ortolan tesado a 31.150 N en un vano de 10 metros de longitud excitado en resonancia a 42 Hz durante veinte millones de ciclos.
Al cabo de cada ensayo, se abrió el conductor para inspeccionar visualmente las roturas de alambres. Los resultados, en la tabla 1.
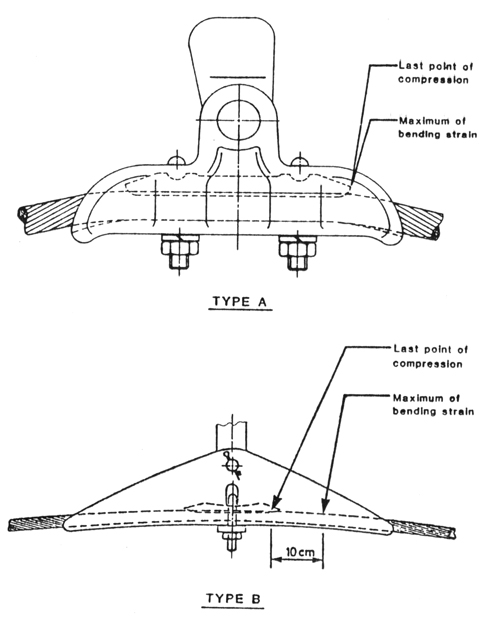
Figura 2
Avril recomienda precauciones específicas para el diseño de las grapas de suspensión. Según él, como las grapas de suspensión soportan cargas permanentes considerables que impiden el adecuado funcionamiento de la articulación (es decir, su articulación con la cadena es prácticamente nula bajo carga), el cable debe situarse empotrado a ambos lados de la grapa. Esto enfatiza la importancia de dar a la grapa un generoso radio de curvatura longitudinal suficiente para que la presión radial no sea tan grande como para aplastar los alambres de aluminio en su interior. Además, recomienda usar una grapa suficientemente larga, y reducir la longitud del apretador dejando así un espacio libre para permitir el libre desplazamiento angular del cable a cada lado de la grapa, de manera similar a las recomendaciones de Seppä.
Finalmente, CIGRE elaboró otra guía, en donde propone procedimientos para el ensayo de fatiga de conductores con grapa para facilitar la comparación de los resultados.

Figura 3
Movilidad de la grapa de suspensión
Al tener en cuenta todos los movimientos que el conductor pueda tener en una línea en servicio, surge que la grapa mejor diseñada es la que tiene la mayor cantidad posible de movimientos o grados de libertad, de manera que pueda acompañar los movimientos originados en el conductor sin ofrecer impedimentos.
Una grapa adecuadamente proyectada debería tener, por lo menos, tres grados de libertad, a saber:
-
Movimiento de cabeceo, caracterizado por una rotación en el plano longitudinal vertical que contiene al conductor, con articulación perpendicular. Esta movilidad acompaña las vibraciones eólicas del cable.
-
Movimiento pendular, caracterizado por una movilidad paralela a la dirección del viento, que permite la inclinación de la grapa por acción del viento.
-
Movimiento longitudinal, caracterizado por una movilidad en el sentido del conductor para absorber los movimientos originados por la diferencia de tiros asimétricos.
Este tipo de grapa, que denominamos “triarticulada”, presenta la ventaja de una amplia movilidad. Pero, en su realización práctica, muchas veces, debido a la necesidad de utilizar diversos componentes, aumenta su longitud vertical, alejando el conductor de los aisladores, con los consiguientes problemas de distribución de potencial eléctrico sobre la cadena.
Figuras 4 y 5
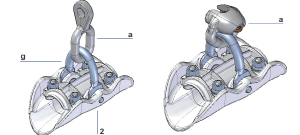
La introducción del concepto de grapa tipo poliarticulada consiste en anular o reducir al mínimo los esfuerzos secundarios originados en el conductor por los esfuerzos de flexión o de torsión, permitiendo que la grapa forme una curva de transición entre las catenarias adyacentes. El criterio principal de la grapa poliarticulada consiste en asimilar el punto de suspensión a un vínculo isostático, que se mantiene en equilibrio por efecto de la composición de las fuerzas activas (peso y tracción de los cables) y de la reacción de los aisladores. Un esquema de grapa poliarticulada se indica en la figura 4.
Como se aprecia en la figura 4, la articulación centrada (2), que pasa por el centro del conductor, elimina el brazo de palanca que puede originar esfuerzos de flexión en la boca de la grapa. Además, el centro de rotación de la grapa tiende a coincidir con el nodo de la onda de vibración, reduciendo también el momento de reacción inercial producido por las vibraciones. Por otra parte, la articulación entre el gancho (g) y la pieza intermedia (a) tiene por efecto una reducción considerable de la torsión del cable por acción del viento.
La pieza intermedia (a), en la suspensión poliarticulada para cadenas de suspensión simple de líneas de alta tensión, puede ser directamente el componente último del lado bajo tensión (órbita-anillo), tal como se ve en la figura 5.
En cadenas de suspensión para líneas de extra alta tensión, con haz de conductores múltiples, la conexión de la grapa al yugo monoplaca (c) se realiza mediante un grillete (b), como se ve en la figura 6, proporcionando una articulación intermedia entre gancho y grillete que permite equilibrar la torsión de los conductores producida por efecto del viento.
Por lo tanto, la conexión directa del componente órbita-anillo o grillete en la cadena representa otra ventaja, de tipo eléctrica, ya que permite reducir considerablemente la distancia entre conductor y aislador y mejorar la distribución de potencial. El componente (a) de la figura 5 es un diseño especial realizado por Dynalab para optimizar dicha propiedad.
Dinámica de la grapa de suspensión
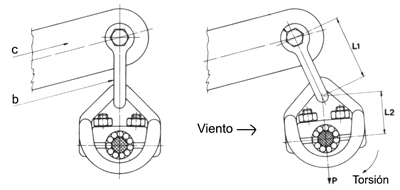
Figura 6
Las deformaciones dinámicas en el conductor, y por lo tanto su resistencia a la fatiga, son fuertemente influenciadas por el comportamiento dinámico de la grapa de suspensión. Que esta tenga movilidad o no mientras aquel está vibrando depende de los parámetros de diseño de la grapa, de los parámetros del vano y de la frecuencia de vibraciones. De acuerdo con Seppä, quien llevó a cabo un extenso programa de estudios teóricos y experimentales sobre el tema usando las grapas de suspensión que se muestran en la figura 7, los parámetros importantes de la grapa a tener en cuenta son: el momento de inercia con respecto a un eje horizontal normal al eje del conductor, el largo de la grapa y la distancia entre la articulación de la grapa y el eje del conductor (brazo de palanca). Los parámetros del vano son: el tiro del conductor, la rigidez flexional del conductor y la diferencia de longitudes de los vanos adyacentes.
Los resultados principales obtenidos son: a) Una grapa de suspensión con elevada inercia restringe la propagación de las vibraciones de un vano al otro y conduce a un sustancial incremento de las deformaciones dinámicas comparada con una grapa más liviana; b) Una grapa más larga tiende a reducir las deformaciones dinámicas; c) El brazo de palanca no constituye un parámetro significativo siempre que no se aparte mucho del eje del conductor.
En virtud de todo lo mencionado, podemos concluir que los parámetros de diseño más importantes con respecto al rendimiento de la grapa de suspensión son: las curvaturas longitudinales y transversales del cuerpo y del apretador; las longitudes del cuerpo y del apretador; el momento de inercia de la grapa con respecto a un eje horizontal y su rigidez flexional. Por otra parte, con respecto a su movilidad, y conforme a CIGRE, la grapa debe ser capaz de rotar para acomodarse a las distintas cargas asimétricas y diferentes longitudes de vano. Además, su eje de rotación no debería estar más allá de unos pocos diámetros de conductor (brazo de palanca, lo más corto posible).

Figura 7
Requerimientos eléctricos
Los requerimientos eléctricos de la grapa de suspensión están referidos a:
-
Capacidad para soportar las corrientes de cortocircuito sin producir daños.
-
Limitación del nivel de radiointerferencia.
-
Reducción de pérdidas eléctricas.
Figura 8
Grapa de suspensión Dynalab
El diseño de la grapa de suspensión desarrollada por Dynalab y protegida mediante la patente N° 010100976 está basado en los criterios mencionados, y tiene por objeto acompañar la evolución del proyecto de las líneas de transmisión y reducir costos de fabricación.
Así, las recomendaciones mecánicas arriba señaladas, y el cumplimiento de los requerimientos eléctricos sobre la capacidad frente a intensidad del cortocircuito, nivel de radiointerferencia y de pérdidas eléctricas han sido adecuadamente evaluadas y aplicadas en el proyecto de la grapa.
La calificación y validación se obtuvo mediante ensayos eléctricos y mecánicos requeridos por la norma IEC 61.284, y la evaluación del comportamiento frente a la fatiga del conductor se realizó mediante la guía CIGRE.
Los ensayos que se llevaron a cabo son:
Eléctricos:
-
RIV - corona y sobretensiones a frecuencia industrial bajo lluvia
-
Arco de potencia
-
Pérdidas ferromagnéticas
Mecánicos:
-
Comportamiento a fatiga del conductor dentro de la grapa
-
Deslizamiento longitudinal
-
Resistencia a la rotura
-
Resistencia al torque
Funcionales
-
Vibraciones in situ, cuyos resultados cumplen satisfactoriamente los niveles residuales de vibraciones recomendados por las normas.
La grapa de suspensión Dynalab (figura 8) es de diseño poliarticulado: la articulación pasa por el centro del conductor; es antimagnética: las pérdidas ferromagnéticas ensayadas son muy inferiores a los requerimientos de norma; es resistente al cortocircuito, de acuerdo al ensayo de arco de potencia realizado; tiene un adecuado perfil longitudinal, es liviana y tiene momento de inercia reducido por lo que tiene buen rendimiento frente a la fatiga, conforme con los ensayos de laboratorio y mediciones de campo realizados. El proyecto de la grapa permitió efectuar una importante reducción de costos de fabricación.
Referencias
Nota del editor: La nota técnica aquí publicada está respaldada por una extensa bibliografía cuyas referencias no se publican por normas editoriales. Por consultas de esta índole, o cualquier otra acerca de la temática tratada, consultar al autor. |

